SL鉄道模型転車台電動化(ロボゼロボード編)
2013年3月9日
しばらくロボゼロのマイコンボードでSL鉄道模型を動かしていなかったので今回は転車台を動かしてみます。
これまでロボゼロのボードを使って転車台実験、ポイント制御、センサー制御をやってきました。
今回は転車台とセンサーさらに無線(BlueTooth)を組み合わせて転車台の制御をしてみます。
まずセンサーの設置ですが自動停止装置と同じく転車台入口に2個取り付けます。
ただし今回は車両を制御するのはリレーでなくサーボで行うのでセンサーが感知してから車両が停止するまで少し時間がかかるので1番線に入る引込線に取り付けるセンサーを転車台からひとつ離れた位置にしました。

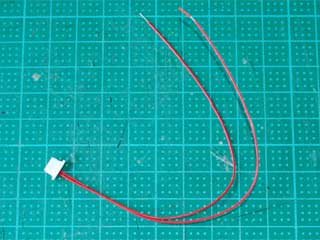
センサーはロボゼロのジャイロセンサーを接続する5PINのコネクターに接続します。
ボード写真左のコネクタの下から2番目(2番端子)と3番目(3番端子)がそうです。
なお5PINのコネクターは下記の材料で作成できます。
リセプタクルハウジング,SHR-05V-S-B
ワイヤアセンブリ,SH3-SS5-28150
今回使ったジャイロセンサーの端子はアナログデータのポート4と6に対応します。
プログラムからはINPUTADC(4)とINPUTADC(6)でデータが取得できます。
。
転車台用のサーボはサーボ24用のコネクターに差し込みます。
車両制御用のサーボはサーボ23用のコネクターに差し込みます。
後の方からサーボを割り付けているのは赤外線リモコンの不具合に対応するためです。
なお車両制御用のサーボはNATOCで使う時はサーボIDを変更してのでロボゼロのボードで使う時は工場出荷状態の1に戻しておく必要があります。
車両制御用サーボは転車台電源に対応しているものを使います。
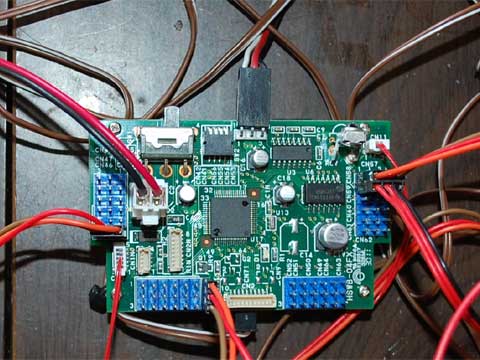
実際に接続したロボゼロコントラーです。
ボード上部の白赤黒のケーブルはパソコンとつなぐシリアルケーブルです。
ボード画面中央右の黒赤のケーブルは電源ケーブルで7.4Vの電圧を与えています。
ボード左の茶赤橙のケーブルはセンサーのボードに電源を供給してるコネクターで端の橙色のリード線はつながっていません。
その下のコネクターはセンサーの出力につながっているものでコネクターの下から2,3番の端子と接続されています。
ボード下の茶赤橙のケーブルはBluetoothアダプターにつながっています。
ボード右の2組の赤赤黒のケーブルは転車台と車両制御用のサーボのケーブルです。
その上はスピーカー端子でジオコレサウンドユニットのスピーカーに接続されています。
今回使ったロボゼロのプログラムはこちらです。
赤外線リモコンはAモードしか対応していませんが後述の無線にも対応しています。
プログラムでサーボの設定値は絶対値で指定していますので使用するサーボのホームポジションは原点(0)にしておく必要があります。
ホームポジションはRXコントローラのポーズエディターで設定できます。
自動起動モードでプログラムを起動する場合はホームポジションをSDカードに書き込んでおく必要があります。
本プログラムの操作は次の通りです。
▲ボタン 車両前進(時計回り)
▼ボタン 車両後進(反時計回り)
●ボタン 車両停止
>ボタン 転車台→待避線移動(2秒間通電)
<ボタン 待避線→転車台移動(2秒間通電)
0ボタン 転車台→本線
+ボタン 短距離移動(0.2秒間通電)
1~5ボタン 転車台回転
Aボタン 正転モード
Bボタン 反転モード
車両は転車台手前で自動的に停止します。(引込線と接続している場合は直進)
引込線に接続するように転車台を回転して回転が終了すると自動的に車両を直進させます。
車両は転車台で自動的に停止します。
車両を転車台で自動的に停止させるためにはこちらの改造が必要です。
1~5のボタン操作で転車台を回転させます。
>ボタンで待避線に移動させたり、0ボタンで本線に発車させる事ができます。
>ボタンと<ボタンは自動的に車両を発進、停止するため正しい位置で止まらない場合があります。
その時は+ボタンを押すと少しの距離だけ移動させる事ができます。
今回はBluetoothアダプタを使って無線操作をやってみます。
BlueToothアダプタについてはロボゼロBluetoothコントローラーやロボゼロサーボBluetoothコントローラー を参照してください。

ロボゼロBluetoothコントローラーを使えばandroid携帯で操作する事ができます。
画面に表示された赤外線リモコンのボタンをタッチすれば赤外線リモコンと同じ操作ができます。
またandroidの音声認識機能を使えば音声で操作する事もできます。
画面の をタッチしてマイク向って音声で指示します。
をタッチしてマイク向って音声で指示します。
音声認識させる語彙はロボゼロBluetoothコントローラーのボタン設定コマンドで変更する事ができます。
実際に動作させた動画です。
今回はBluetoothアダプタを使ってスマートフォーンで操作してみました。
Nゲージの場合、無線を使うメリットはあまりないのですが自分の携帯で操作できるのは少しおもしろいかと思います。
ロボゼロのコントロールボードをロボゼロ以外に使用していますのであくまでも自己責任という事でお願いします。
目次に戻る