俽俴揝摴柾宆揮幵戜揹摦壔(帺摦掆巭憰抲曇)
2013擭2寧22擔
丂俽俴揝摴柾宆揮偺揮幵戜偱偡偑揹摦壔偟偨傕偺傪
僗僀僢僠偵傛傞儅僯儏傾儖憖嶌
偱摦偔傛偆偵偟偰偒傑偟偨丅
丂庤摦傗僗僀僢僠偵傛傞儅僯儏傾儖憖嶌偺応崌丄揮幵戜偺埵抲偑楍幵偺怤擖慄楬偲崌偭偰偄側偄偲摉慠丄楍幵偼扙慄偟傑偡丅
丂傑偨揮幵戜偑夞揮拞偵楍幵偑旘傃崬傫偱偔傞壜擻惈偑偁傝傑偡丅
丂柾宆偺悽奅偱偼嫋偝傟傑偡偑幚嵺偺幵椉偩偭偨傜戝曄側帠屘偵側傝傑偡丅
丂俶俙俿俷俠偱偼僇儊儔傪巊偭偰偙偺傛偆側応崌丄嬞媫掆巭偡傞婡擻偑偁傝傑偡丅
丂偦偙偱俶俙俿俷俠傪巊傢側偄応崌偱傕偙偺婡擻傪幚尰偱偒側偄偐傗偭偰傒傑偟偨丅
丂埲慜
儘儃僛儘僐儞僩儘乕儔乕偱儗僀傾僂僩傪惂屼
偟偨帪僙儞僒乕傪巊偭偰傒傑偟偨丅
丂偙偺僙儞僒乕傪俀偮揮幵戜偵怤擖偟偰偔傞慄楬偵抲偄偰偍偒傑偡丅
丂傑偨楍幵傪掆巭偝偣傞偺偵儕儗乕傪侾屄巊偄傑偡丅
丂儕儗乕偱儗僀傾僂僩偺庡揹尮傪僆儞僆僼偟傑偡丅
丂儕儗乕偼忢帪僆儞忬懺偱偡偑偱僙儞僒乕偑楍幵傪姶抦偟偨帪偵摥偄偰庡揹尮傪僆僼偵偟傑偡丅
丂僙儞僒乕偼慜夞摨條丄TOMIX偺
TCS儚儞僞僢僠僙儞僒乕(宆斣5558)
偲偄偆偺傪巊偄傑偟偨丅
丂愝抲応強偱偡偑儚儞僞僢僠僙儞僒乕偺応崌儗乕儖偵DC僼傿乕僟乕傪嵎偟崬傓応強偵偺愝抲偡傞偺偱愝抲応強偼尷傜傟偰偒傑偡丅
丂偦傟偧傟揮幵戜偵堦斣嬤偄埵抲偵愝抲偟傑偡丅
丂偙傟傜偺埵抲偼側偐側偐愨柇偱儗僀傾僂僩壓懁偺偵愝抲偟偨曽偼彮偟嫍棧偑偁傝傑偡偑捈慄側偺偱寢峔揮幵戜偓傝偓傝偱巭傑傝傑偡丅
丂SL揝摴柾宆偺僐儞僩儘乕儔乕傪巊偭偨応崌丄拞懍(僣儅儈拞墰)偱BD2012婡娭幵偑挌搙偄偄埵抲偱巭傑傝傑偡丅
丂側偍僆儕僕僫儖偺揮幵戜偼偙傟傜偺慄楬偲愙懕偟偨帪偼杮慄偲揮幵揹尮偑捠揹偟偰偟傑偄傑偡丅
丂偦偺偨傔揮幵戜偱楍幵傪巭傔傞偵偼
偙偪傜
偺夵憿偑昁梫偲側傝傑偡丅
丂傑偨崱夞偼僙儞僒乕傪慄楬偺奜懁偵愝抲偟傑偟偨偑働乕僽儖傪嵎偟崬傓僐僱僋僞傪媡偺曽偵偡傟偽撪懁偵愝抲偡傞帠偑偱偒傑偡丅
丂僗僀僢僠憖嶌偺攝慄恾傪婎杮偲偟偰僙儞僒乕偲儕儗乕傪奼挘偟傑偡丅
丂僗僀僢僠偺攝慄偵偮偄偰偼
慜夞偺婰帠
傪嶲徠偟偰偔偩偝偄丅
丂崱夞巊偆僙儞僒乕偺弌椡偼3杮偁偭偰恀傫拞偑GNR丄椉抂偑怣崋慄偱楍幵偺恑峴曽岦(慄楬偺揹棳偺曽岦)暿偵暘偐傟偰偄傑偡丅
丂崱夞偼楍幵偺曅曽偺恑峴曽岦偩偗傪専弌偡傞偨傔偳偪傜偐堦曽偺怣崋慄傪巊偄傑偡丅
丂5斣慄(儗僀傾僂僩壓懁)偺帪偼楍幵偑帪寁夞傝丄1斣慄(儗僀傾僂僩壓懁)偺帪偼楍幵偑斀帪寁夞傝偺帪偵斀墳偡傞傛偆偵僙僢僩偟傑偡丅
丂廬偭偰偦傟偧傟堘偭偨怣崋慄傪巊偄傑偡丅
丂傑偨僙儞僒乕偺僐僱僋僞偼嵍塃俀偮偁偭偰愙懕偝傟傞慄偑媡偵側傞傛偆偱偡丅
丂崱夞偼椉曽偲傕報偺偁傞曽傪巊偄傑偡丅
丂僙儞僒乕傪慄楬偺撪懁偵愝抲偡傞応崌偼媡懁偺僐僱僋僞傪巊偊偽椙偄偲巚偄傑偡丅
丂僙儞僒乕偺怣崋慄傪ARDUINO偺A0(傾僫儘僌0斣)偲A1(傾僫儘僌1斣)偵愙懕偟傑偡丅
丂恑峴曽岦偵崌傢偣偨偺偱A0偵愙懕偡傞僙儞僒乕傪帪寁夞傝(5斣慄)丄A1偵愙懕偡傞僙儞僒乕傪斀帪寁夞傝(1斣慄)偲偟傑偟偨丅
丂偦傟偧傟巊偆怣崋慄偼A0偺曽偑悈怓偺儅乕僋偺偁傞曽偱A1偺曽偑側偄曽傪愙懕偟傑偟偨丅
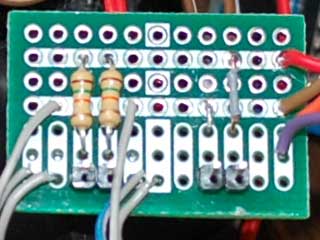
丂偦傟偧傟偺怣崋慄偵偼10乣20K兌偺僾儖傾僢僾掞峈傪愙懕偟偰偍偒傑偡丅
丂慜夞偼10K兌偺傕偺傪巊偄傑偟偨偑崱夞偼庤帩偪偑側偐偭偨偺15K兌偺傕偺傪巊偄傑偟偨丅
丂僾儖傾僢僾掞峈偺曅曽偺懌偼2杮傑偲傔偰ARDUINO偺5V偵愙懕偟傑偡丅
丂ARDUINO偺5V偼揮幵戜偺僒乕儃偺揹尮偵傕巊偄傑偡偺偱暘攝偡傞昁梫偑偁傝傑偡丅
丂暘攝偟側偄応崌偼偍偦傜偔椬偺3.3V偵愙懕偱偒傞偐傕抦傟傑偣傫丅(僾儖傾僢僾掞峈偺抣傪曄偊偨傝僗働僢僠偺僙儞僒乕姶搙傪曄峏偡傞昁梫偑偁傞偐傕抦傟傑偣傫偑)
丂僙儞僒乕偺恀傫拞偺慄傕傑偲傔偰ARDUINO偺GND偵愙懕偟傑偡丅
丂崱夞偼僒乕儃偺GND偲嫟捠偵偟傑偟偨偑椬傕GND僺儞側偺偱偦偙偵愙懕偟偰傕峔偄傑偣傫丅
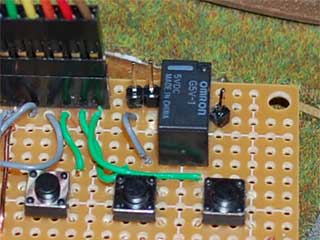
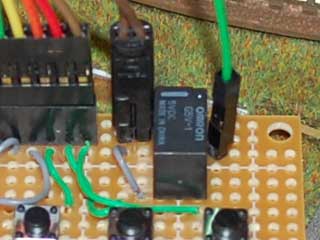
丂庡揹尮傪僆儞僆僼偡傞偺偼5V偺彫宆儕儗乕傪巊偄傑偡丅
丂
婎斅梡儕儗乕 1夞楬2愙揰 / G5V-1 DC5V
偲偄偆偺傪巊偄傑偟偨丅
丂捠忢偼偮側偑偭偨忬懺偵偟偨偄偺偱NC(1斣抂巕,僲乕儅儖僋儘乕僘)偲COM((5,6斣抂巕)偵庡揹尮偺曅曽偺慄傪愙懕偟傑偡丅
丂崱夞NO(10斣抂巕,僲乕儅儖僆乕僾儞)偼巊偄傑偣傫丅
丂儕儗乕偺僐僀儖(2,9斣抂巕)偼ARDUINO偺D6(僨僕僞儖6PIN)偲GND偵愙懕偟傑偡丅
丂NATOC偺庡揹尮偺儕儗乕偑D6偲D7傪巊偭偰偄傞偺偱D6偵偟傑偟偨丅(曄峏偡傞応崌偼僗働僢僠傪廋惓)
丂崱夞偺幚憰偼僙儞僒乕梡偺婎斅傪怴偨偵捛壛偟偰儕儗乕傪僗僀僢僠婎斅偵嵹偣傑偟偨丅
丂堦墳僗僀僢僠偲庡揹尮偼僐儞僩儘乕儔宯偲偟偰僙儞僒乕偼僙儞僒乕宯偲偟偰暘偗偰偄傑偡丅
丂傕偪傠傫僙儞僒乕偺掞峈傕僗僀僢僠婎斅偵嵹偣偰傕峔偄傑偣傫偑丄僙儞僒乕偼傑偨暿偺梡搑偵傕巊偊傞傛偆暘偗偰偄傑偡丅
丂側偍僒乕儃偺揹尮偲僙儞僒乕偺揹尮傪嫟捠壔偡傞偨傔僙儞僒乕梡偺婎斅偐傜僒乕儃偺揹尮傪庢傞傛偆偵偟傑偟偨丅
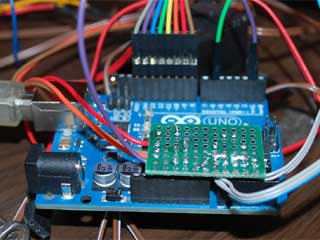
丂ARDUINO偲僙儞僒乕梡婎斅偼僿僢僟乕僺儞傪2杮偢偮愗傝庢偭偨傕偺傪ARDUINO偺5V,GND偲A0,A1僜働僢僩偵巋偝傞傛偆偵婎斅偵僴儞僟晅偗傪偟偰偄傑偡丅
丂僙儞僒乕偺巊梡偟側偄怣崋慄傕働乕僽儖偑愗傟側偄傛偆偵偡傞偨傔婎斅偺嬻偄偨強偵僴儞僟晅偗傪偟偰偄傑偡丅
丂僒乕儃傪嵎偟崬傓3P偺QI働乕僽儖傪偙偺婎斅偵僴儞僟晅偗偟偰5V偲GND偺僺儞偲愙懕偟偰偄傑偡丅
丂傑偨QI働乕僽儖偺怣崋慄偼1P偺QI働乕僽儖偲僴儞僟晅偗偟偰偙偺僺儞傪ARDUINO偺TX(僨僕僞儖1斣)偵嵎偟崬傫偱愙懕偡傞傛偆偵偟偰偄傑偡丅
丂儕儗乕傪婎斅偺嬻偒僗儁乕僗偵嵹偣1杮偲2杮偵愗傝庢偭偨僿僢僟乕僺儞傪儕儗乕偺僺儞偺嬤偔偵攝抲偟傑偡丅
丂1杮偺僿僢僟乕僺儞偼丄儕儗乕偺9斣僺儞偺嬤偔偵攝抲偟儕儗乕偺9斣僺儞偲僴儞僟晅偗傪偟傑偡丅
丂偙偺僺儞偵偼ARDUINO偺D6偲愙懕偡傞偨傔QI働乕僽儖僔儞僌儖僺儞(僾儔僌偲僜働僢僩傪愙懕偟偨傕偺傪巊梡)偵愙懕偟傑偡丅
丂2杮偺僿僢僟乕僺儞偼丄儕儗乕偺1斣僺儞偺嬤偔偵攝抲偟堦曽偺僿僢僟乕僺儞傪儕儗乕偺1斣僺儞偲僴儞僟晅偗傪偟傑偡丅
丂傕偆堦曽偺僿僢僟乕僺儞偼儕儗乕偺2斣僺儞傑偨偼9斣僺儞偵攝慄偟傑偡丅
丂巆傝偺9斣僺儞傑偨偼2斣僺儞偼僗僀僢僠婎斅偺GND慄偵攝慄偟傑偡丅
丂偙偺僺儞偵偼庡揹尮偺僐乕僪(DC墑挿僐乕僪傪巊梡)偺曅曽傪搑拞偱愗抐偟偨慄傪愙懕偟傑偡丅
丂愗抐偟偨慄偼庤帩偪偺N僎乕僕梡偺愙懕働乕僽儖傪寢慄偟偨傕偺傪巊梡偟傑偟偨丅
丂arduino偵僙儞僒乕懳墳偺揮幵戜僾儘僌儔儉傪揮憲偟傑偡丅
丂僾儘僌儔儉偵娭偟偰偼
偙偪傜偺婰帠
傪嶲徠偟偰偔偩偝偄丅
丂崱夞偺僗働僢僠偼
偙偪傜
偵側傝傑偡丅
丂偙偪傜偺僗働僢僠偼埲慜偺揮幵戜梡偺僗働僢僠偵抲偒姺偊傞傕偺偱僙儞僒乕傪巊傢側偄帪傕嫟捠偱巊偊傑偡丅
丂慜夞偺僗働僢僠偲摨條偵揮幵戜偺掆巭埵抲偺挷惍偑昁梫偱偡丅
丂揮幵戜偺掆巭埵抲偺挷惍偼
偙偪傜偺婰帠
傪嶲徠偟偰偔偩偝偄丅
boolean sensor = false; //僙儞僒乕傪巊偆帪偼true偵曄峏
boolean auto_mode = true; //帺摦揑偵揮幵戜傪愙懕偡傞偺傪傗傔傞応崌偼false偵曄峏
int sensor_level = 750; 丂//僙儞僒乕姶搙(僙儞僒乕偺斀墳偵墳偠偰挷惍)
丂僙儞僒乕傪巊偆応崌偼sensor偵僙僢僩偡傞抣傪false偐傜true偵曄峏偟偰偔偩偝偄丅
丂帺摦揑偵揮幵戜傪愙懕偡傞応崌偼auto_mode偵僙僢僩偡傞抣傪true偺傑傑偵偟偰偍偄偰偔偩偝偄丅
丂sensor_level偼儕儗乕傪摦嶌偝偣傞僙儞僒乕擖椡偺傾僫儘僌抣傪巜掕偟傑偡丅
丂偙偺抣偼傾僫儘僌擖椡偺揹埑偵懳墳偟偰偍傝0乣1023(0乣5V)偺斖埻偱巜掕偟傑偡丅
丂揹埑偑偙偺抣傛傝彮側偔側偭偨帪偵儕儗乕傪摥偐偣偰楍幵傪巭傔傑偡丅
丂楍幵偑捠夁偟偰傕儕儗乕偑摥偐側偄傛偆側応崌偼偙偺抣傪崅偔偟偰彮偟偺揹埑曄壔偱斀墳偡傞傛偆偵愝掕偟偰傒偰偔偩偝偄丅
丂幚嵺偵摦嶌偝偣偨摦夋偱偡丅
丂丂丂丂丂
丂帺摦儌乕僪傪愝掕偡傞偲幵椉偑巭傑偭偨応崌丄帺摦揑偵幵椉偺偄傞慄楬偵揮幵戜傪摦偐偟偰偔傟傑偡丅
丂偙偺婡擻偼妱偲曋棙偱揮幵戜偺憖嶌傪偁傑傝峴傢側偔偰傕楍幵傪憖嶌偱偒傑偡丅
丂崱夞巊偭偨TCS儚儞僞僢僠僙儞僒乕偼娙扨偵愝抲偱偒傑偡偑奜晅偗偺偨傔儗僀傾僂僩偱彮偟栚棫偭偰偟傑偄傑偡丅
丂5567偲偄偭偨儚僀僪儗乕儖丒僗儔僽儗乕儖梡僙儞僒乕傪巊偊偽愝抲偺偨傔偺夵憿偑昁梫偵側傝傑偡偑儗僀傾僂僩傪懝偹偢偵愝抲偡傞帠偑偱偒傞偲巚偄傑偡丅
丂側偍崱夞偺傛偆側夵憿傪峴偆偲揮幵戜傪攋懝偟偰偟傑偭偨傝摦嶌晄椙偵側傞応崌偑偁傝傑偡偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
栚師偵栠傞