俽俴揝摴柾宆億僀儞僩揹摦壔(儘儃僛儘儃乕僪曇)
2013擭1寧13擔
丂俽俴揝摴柾宆偺億僀儞僩偺揹摦壔偱偡偑巆偭偰偄偨堷崬慄偺暘婒億僀儞僩偺揹摦壔傪峴偄傑偟偨丅
丂愝抲偼慜夞偺愝抲峴偭偨曽朄偲傎傏摨偠偱偡丅
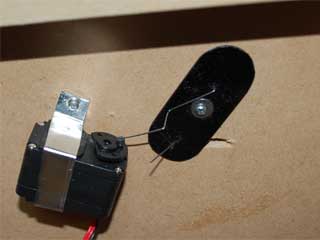

丂僒乕儃偺岦偒偑慜夞偲堘偆偺偱儘僢僪偺僒乕儃儂乕儞傊堷偭妡偗傞僇僊偺岦偒偑堎側偭偰偄傑偡丅
丂崱夞偺摦嶌僥僗僩偼儘儃僛儘偺僐儞僩儘乕儖儃乕僪偱峴偭偰傒傑偡丅
丂儘儃僛儘偺僐儞僩儘乕儖儃乕僪偼慜夞偺揮幵戜偺幚尡偱巊梡偟偰偄傑偡丅
丂幵椉偺惂屼偺偨傔僒乕儃傪傂偲偮捛壛偟傑偡丅
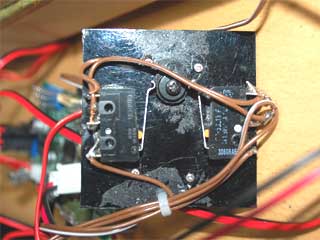
丂僒乕儃偱幵椉偺惂屼傪峴偆曽朄偼偙偪傜傪嶲峫偵偟偰偔偩偝偄丅

丂幵椉梡僒乕儃傪SV23偵億僀儞僩偺僒乕儃傪SV22乣SV20偵愙懕偟傑偡丅
丂儘儃僛儘偺僐儞僩儘乕儖儃乕僪偱惂屼偡傞偨傔僒乕儃ID傗捠怣懍搙偼岺応弌壸偺傑傑偱峔偄傑偣傫丅

丂崱夞偺僥僗僩梡偺儗僀傾僂僩偱偡丅
丂儗僀傾僂僩偺嵍懁傪俀廳儖乕僾偵偟偰億僀儞僩1偲億僀儞僩2偱奜懁偲撪懁偺儖乕僾傪愗傝懼偊傑偡丅
丂傑偢愒奜慄儕儌僐儞偱憖嶌偱偒傞傛偆偵偟傑偡丅
丂慜夞愙懕僒乕儃偺悢偑彮側偄偲愒奜慄儕儌僐儞偑岆摦嶌偟偨偨偨傔僐儞僩儘乕儖儃乕僪偺揹埑傪彮偟忋偘偰偄傑偟偨丅
丂崱夞偼僒乕儃傪係屄愙懕偟偰偄傞偨傔婯掕偺7.4V偱愒奜慄儕儌僐儞偺岆摦嶌偼偁傝傑偣傫偱偟偨丅
丂愒奜慄儕儌僐儞梡偺儘儃僛儘僾儘僌儔儉偼偙偪傜偱偡丅
丂儕儌僐儞偺仯儃僞儞偱帪寁夞傝丄仴儃僞儞偱斀帪寁夞傝丄仠偱儃僞儞掆巭丄亜儃僞儞偲亙儃僞儞偱億僀儞僩1,2愗傝懼偊丄侽儃僞儞偲亅儃僞儞偱億僀儞僩3偺傪愗傝懼偊偱偡丅
丂俙俛俠儃僞儞偱偦傟偧傟偺岠壥壒偺僒僂儞僪傪柭傜偟傑偡丅
丂愜妏儘儃僛儘偺僐儞僩儘乕儖儃乕僪傪巊偭偰偄傞偺偱儘儃僛儘僾儘僌儔儉偱帺摦塣揮傪峴偭偰傒傑偡丅
丂帺摦塣揮梡偺儘儃僛儘僾儘僌儔儉偼偙偪傜偱偡丅
丂崱夞偼億僀儞僩1,2偱儗僀傾僂僩偺奜廃愜妏儘儃僛儘偺僐儞僩儘乕儖儃乕僪傪巊偭偰偄傞偺偱儘儃僛儘僾儘僌儔儉偱帺摦塣揮傪峴偭偰傒傑偡丅
丂嵟弶悢廃丄奜懁傪帪寁夞傝偵夞偭偰億僀儞僩1,2傪愗傝懼偊偰撪懁傪憱峴偡傞傛偆偵偟傑偡丅
丂嵞傃奜懁偵栠偟偰斀帪寁夞傝偵悢廃憱峴偟偰億僀儞僩3傪愗傝懼偊偰堷偒崬傒慄偵幵椉傪擖傟傑偡丅
丂堷崬慄偱悢昩掆巭偟偰敪幵儀儖(岠壥壒僒僂儞僪)偲嫟偵弌敪偡傞偲偄偆僾儘僌儔儉偺棳傟偱偡丅
丂崱夞偼俶俙俿俷俠偺僇儊儔傪巊偭偰偄側偄偺偱楍幵偺惂屼偼僞僀儅乕傪巊偭偰僐儞僩儘乕儖偟偰偄傑偡丅
丂惂屼偡傞僞僀儈儞僌偼僾儘僌儔儉偺僞僀儅乕偺抣偱挷惍偟偰偄傑偡丅
丂偦偺偨傔僾儘僌儔儉奐巒偺幵椉偺埵抲偲憱峴懍搙偼堦掕偵偟偰偍偔昁梫偑偁傝傑偡丅
丂愒奜慄儕儌僐儞偺応崌丄億僀儞僩侾偲億僀儞僩俀偼摨帪偵愗傝懼偊偰偄傑偟偨偑幵椉偑嵍懁偺俀廳儖乕僾偱峴偆偲揹尮偑嫙媼偝傟側偔側傝億僀儞僩傪愗傝懼偊傞僞僀儈儞僌偑擄偟偔側傝傑偡丅
丂偙偺偨傔帺摦塣揮僾儘僌儔儉偱偼僞僀儈儞僌傪彮偟偢傜偟偰愗傝懼偊偰偄傑偡丅
丂儕儌僐儞偲帺摦塣揮偺僾儘僌儔儉偱巊偭偰偄傞僒僂儞僪偼俶俙俿俷俠偱採嫙偟偰偄傞僒僂儞僪僼傽僀儖傪儘儃僛儘梡偵壛岺偟偰51斣僼傽僀儖偵偟偰俽俢僇乕僪偵揮憲偟偰傑偡丅
丂幚嵺偵摦嶌偝偣偨摦夋偱偡丅
丂丂丂丂丂
丂儘儃僛儘偺僐儞僩儘乕儖儃乕僪傪巊偭偨応崌偼僒乕儃偲偺愙懕偑娙扨偵峴偆帠偑偱偒傑偡丅
丂帺摦塣揮偼僙儞僒乕偑側偄偺偱僞僀儈儞僌偑擄偟偄偱偡偑偦偺暘岺晇偡傞昁梫偑偁傝柺敀偄偲巚偄傑偡丅
丂岺晇師戞偱寢峔嬅偭偨僾儘僌儔儉傕嶌傞帠偑偱偒傞偲巚偄傑偡丅
丂儘儃僛儘偺僐儞僩儘乕儖儃乕僪傪儘儃僛儘埲奜偵巊梡偟偰偄傑偡偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
栚師偵栠傞