カメラによる列車位置の検出
・カメラの設定
NATOCはMicroSoftのDirectShowでサポートされているビディオカメラを使って列車位置を検出します。
ビディオカメラのドライバーのインストールは各ビディオカメラに付属しているドライバーソフトとインストール手順書に従ってください。
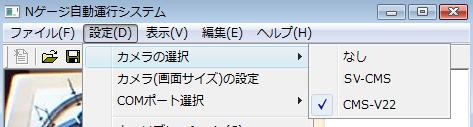
カメラが複数台接続されている場合は下記の操作で位置検出に用いるカメラを選択してください。
・カメラの設置
カメラはなるべくレイアウトの上方に設置して下記のようにレイアウトが画面いっぱいになるようにしてください。
低い位置から撮影すると建物で列車が隠れてしまうため正しく位置検出ができなくなります。なるべく高い位置に設置してください。
カメラの設置場所とアングルはNATOCの画面を見ながら調整してください。微調整はレイアウトを動かす方がやりやすいと思います。


カメラとコンピュータの距離が長くなりカメラのUSBコードが長さが足らなかったりI/Oコントローラの分と合わせてコンピュータ(ノートPC等)のUSBコネクタの数が足らなかったりした場合はケーブルの長いUSBハブ(写真上)を使うのが便利です。
また長さが足らないだけならUSB延長コード(写真下)が使えます。

・フォーカス調整
フォーカスが調整できるカメラの場合、フォーカス調整バーを表示するとフォーカス調整が行いやすくなります。
フォーカス調整バーの表示を行うにはツールバーの アイコンを押してください。
アイコンを押してください。

画面中央に緑でフォーカス調整バーが表示されます。塗りつぶした部分が現在のフォーカス値で大きいほどピントが合っている事になります。
表示開始からの最大値を緑の縦線で表しますのでカメラのフォーカスを調整してなるべくこの値に近づけてください。
フォーカス値の測定はPCに負荷がかかるのでフォーカス調整が終わったらもう一度このアイコンを押して表示を終了してください。
なお自動運転やシミュレーションを行うと自動的に表示が終了します。
・キャリブレーション
キャリブレーションとはカメラの画像とレイアウトの位置の関係を学習させる機能です。
キャリブレーションを行うにはツールバーの アイコンを押してください。
アイコンを押してください。
キャリブレーションが始まると列車が自動的にレイアウト上を走ります。一周したら自動的に停止してキャリブレーションが終了します。
キャリブレーションに続き角度補整を行います。

キャリブレーションで列車が自動運転を行うにはI/Oコントローラとレイアウトが正しく接続されてI/Oコントローラが正しく設定されている必要があります。
カメラやレイアウトの位置を変更した場合もキャリブレーションと角度補整をやり直してください。
なおその場合は角度補整コマンドが自動的に実行されないのでキャリブレーションの終了後、設定メニュの角度補整コマンドを行ってください。
キャリブレーション画面の動画です。
上記のリンクをクリックするとYouTubeに接続します。
・角度補整
角度補整とはカメラの位置により画像の角度を補整させる機能です。
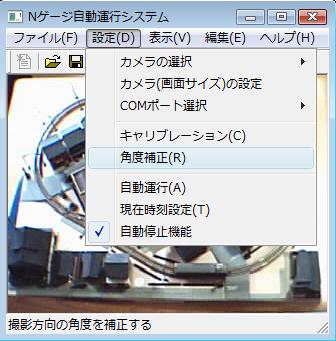
角度補整を行うには設定メニュの角度補整コマンドを実行してください。キャリブレーションを行った時は続けて角度補整コマンドが実行されます。
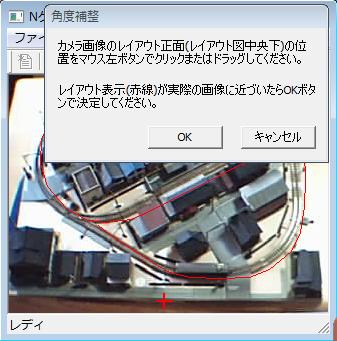
角度補整はカメラ画像のレイアウト正面位置をクリックします。クリックして位置に赤い十字が表示されます。また角度補整された線路が赤線で表示されますのでカメラ画像に近い角度になるようにマウスでドラッグしてください。
OKボタンを押して角度補整を終了させてください。
レイアウト正面がカメラの画像の中央下に写っている場合は補整する必要はありませんが、キャリブレーションの結果が正しいかこのコマンドで確認する事ができます。
・キャリブレーションの保存
キャリブレーションの保存でキャリブレーションデータと角度補整データを保存しておくと次回からはキャリブレーションと角度補整を行う必要はありません。
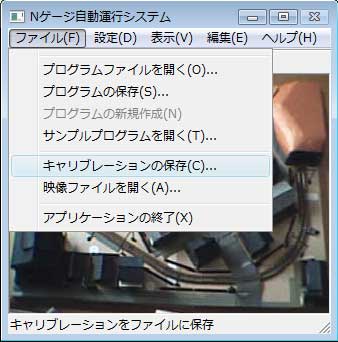
キャリブレーションの保存を行うにはファイルメニュのキャリブレーションの保存コマンドを実行してください。ファイルダイアログが表示されますので任意のフォルダーとファイル名で保存してください。
・自動停止機能
キャリブレーションが正しく行われている場合、列車がホームの車止めの位置に来たのを検出すると下記のダイアログを表示して列車を自動停止します。
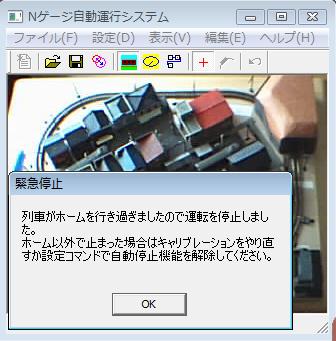
車止めの位置以外で停止した場合はキャリブレーションが正しく行われていない可能性があります。
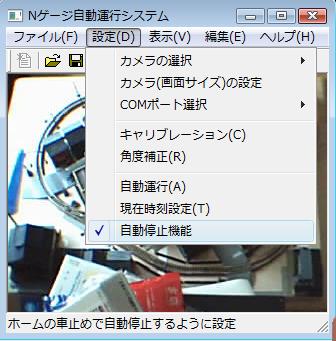
キャリブレーションを行っても車止めの位置以外で停止する場合は、設定メニュの自動停止機能コマンドでこの機能を解除してください。(メニュのチェックを外す)
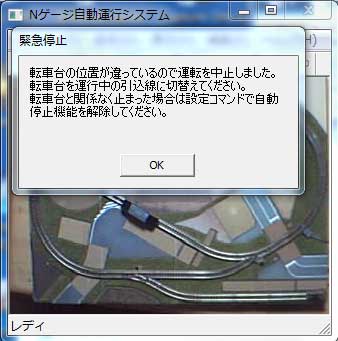
この機能を付けておくと転車台の位置が現在の引込線と合っていない場合も転車台の手前で停止してくれます。
転車台を現在の引込線に合わせて運転を再開してください。
転車台と関係ない場所でこのメッセージが出た場合はキャリブレーションが正しく行われていない可能性があります。
この場合も自動停止機能を解除してください。
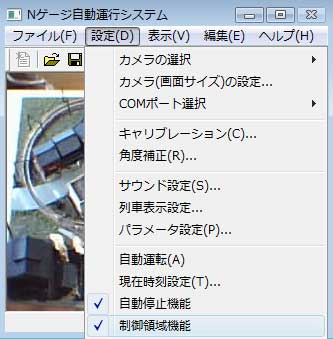
・制御領域機能
レイアウトエディタで制御領域が定義されている場合、列車がこの領域に出入りをするとこの領域で定義されたレイアウト制御が行われます。
制御領域機能を働かせる場合はキャリブレーションが行われている必要が要ります。
この機能によるレイアウト制御を解除するには、設定メニュの制御領域機能コマンドでメニュのチェックを外してください。
・映像ファイルによる位置検出
カメラの画像の代わりに映像ファイル(AVIファイル)を使って列車位置の検出をする事ができます。
列車位置が検出できても映像の列車の制御は行えないのでこの機能は実用的ではありませんが、列車位置の検出機能の評価用にお使いください。
ファイルメニュの映像ファイルを読み込むコマンドで映像ファイル(AVIファイル)を読み込んでください。
読み込んだ映像の列車の検出位置がカーソルで表示されます。読み込んだ映像でもキャリブレーションや角度補整が行えます。
車両位置検出の動画です。
上記のリンクをクリックするとYouTubeに接続します。
目次に戻る