Arduino僀儞僞僼僃僀僗
丒Arduino僀儞僞僼僃僗儃乕僪
丂Arduino梡偺奼挘儃乕僪傪嶌惉偟偰NATOC偺僀儞僞僼僃僀僗偲偟傑偡丅
丂昗弨僀儞僞僼僃僀僗偲摨條偵1夞楬2愙揰偺儕儗乕傪9屄巊梡偟傑偡丅
丂僷乕僣偲偟偰偼師偺傕偺偑昁梫偱偡丅
丂丂Arduino Uno
丂丂婎斅梡儕儗乕 1夞楬2愙揰 / G5V-1 DC5V
丂儕儗乕偼幵椉偺僐儞僩儘乕儖偵2屄丄億僀儞僩傂偲偮偁偨傝2屄偱3婡暘偱偁偲揮幵戜偺ON/OFF偱寁9屄昁梫偱偡丅
丂側偍揮幵戜偺憖嶌偼僒乕儃偱峴偆偨傔暿搑僒乕儃儌乕僞乕偑昁梫偱偡偑偙偺僀儞僞乕僼僃僀僗儃乕僪偵愙懕偱偒傞傛偆偵愝寁偟傑偟偨丅
丂屻偼僾儕儞僩婎斅偲攝慄嵽偱偡偑丄偙傟傕RBIO-2U偺愙懕働乕僽儖偑偦偺傑傑巊偊傞傛偆偵RBIO-2U偲摨偠僐僱僋僞乕傪巊梡偟偰偄傑偡丅
丂丂EH-A儀乕僗晅億僗僩 僩僢僾宆03P9屄
丂丂儈僯ICB婎斅
丂丂楢寢僿僢僟乕僜働僢僩 8P2屄
丂丂QI働乕僽儖8P-8P2屄
丂arduino偲偺愙懕偼8P 偺QI働乕僽儖2杮偱峴偭偰偄傑偡丅
丂N僎乕僕偲偺愙懕偼偙偪傜傪偛棗偔偩偝偄丅
丂忋偺攝慄恾偼CN1(幵椉惂屼慜恑梡)偺弌椡傪昞偟偰偄傑偡丅
丂arduino偺GND偲arduino偺奺弌椡僺儞傪儕儗乕偺僐僀儖偵攝慄偟傑偡丅
丂儕儗乕偺僐僀儖偼嬌惈偑側偄偺偱儕儗乕偺2斣僺儞偲9斣僺儞偳偪傜偱傕峔偄傑偣傫丅
丂僐僱僋僞乕偺COM傪儕儗乕偺5斣傑偨偼6斣偵攝慄偟傑偡丅
丂僐僱僋僞乕偺NC傪儕儗乕偺1斣偵攝慄偟傑偡丅
丂僐僱僋僞乕偺NO傪儕儗乕偺10斣偵攝慄偟傑偡丅
丂摨條偵CN2(幵椉惂屼屻恑梡)傕攝慄偟傑偡丅
丂偙傟傪孞傝曉偟偰9屄暘偺儕儗乕偲僐僱僋僞乕傪攝慄偟偰偄偒傑偡丅
丂奺僐僱僋僞乕偲arduino偺弌椡僺儞偺娭學偼埲壓偺捠傝偱偡丅
丂丂CN1(幵椉惂屼慜恑梡)-6斣PIN
丂丂CN2(幵椉惂屼屻恑梡)-arduino7斣PIN
丂丂CN3(億僀儞僩1捈恑梡)-arduino8斣PIN
丂丂CN4(億僀儞僩1暘婒梡)-arduino9斣PIN
丂丂CN5(億僀儞僩2捈恑梡)-arduino10斣PIN
丂丂CN6(億僀儞僩2暘婒梡)-arduino11斣PIN
丂丂CN7(億僀儞僩3捈恑梡)-arduino12斣PIN
丂丂CN8(億僀儞僩3暘婒梡)-arduino13斣PIN
丂丂CN9(揮幵戜揹尮梡)-arduino4斣PIN
丂arduino偺弌椡僐僱僋僞乕偼2偮偵暘偐傟偰偄偰塃懁(4,6,7)傪幵椉惂屼梡丄嵍懁(8乣13)傪億僀儞僩梡偵偟偰偄傑偡丅
丂側偍arduino偺3斣偲5斣偼屻弎偺PWM梡偺弌椡偲偟傑偡偺偱揮幵戜揹尮偺ON/OFF偼4斣PIN偺弌椡傪巊偭偰偄傑偡丅
丂arduino偺NATOC僀儞僞乕僼僃僀僗梡偺僗働僢僠偼偙偺PIN斣崋偱惂屼偟傑偡偺偱NATOC傪巊偆帪偼忋偺PIN斣崋偵廬偭偰偔偩偝偄丅
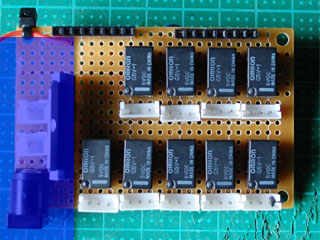
丂婎斅偺幚憰幨恀偱偡丅
丂嵍懁偺惵偄晹暘偼PWM梡偺儌乕僞僪儔僀僶乗偲忋偺儕乕僪慄偼僒乕儃儌乕僞乕梡偺怣崋慄偱偙傟傜偵偮偄偰偼屻偱愢柧偟傑偡丅
丂儕儗乕偑忋偺抜偺嵍偐傜CN1,CN3,CN5,CN7偱壓偺抜偑CN9,CN2,CN4,CN6,CN8偱儕儗乕偺壓偑偦傟偧傟偺僐僱僋僞偱嵍偑NO丄恀傫拞偑COM丄塃偑NC偱偡丅
丂婎斅偺忋偑arduino偲偺愙懕僐僱僋僞乕偱嵍偑1乣8斣PIN丄塃偑9乣13斣PIN偲GND偲愙懕偝傟傑偡丅(0斣PIN偲APREF偼枹巊梡)
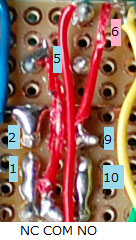
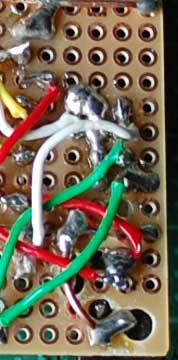
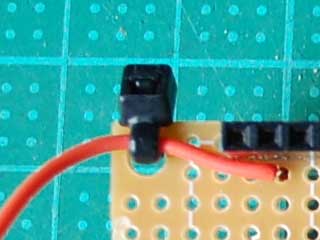
丂塃偺幨恀偼嵍幨恀偺CN1(僴僀儔僀僩晹暘)偺奼戝幨恀偱偡丅
丂僺儞僋抧偺斣崋偑arduino偺僺儞偱悈怓抧偺斣崋偑儕儗乕偺僺儞偱婰崋偼僐僱僋僞乕偺抂巕傪昞偟傑偡丅
丂arduino偺6斣偲儕儗乕偺9斣丄儕儗乕偺5斣偲僐僱僋僞乕偺COM傪攝慄偟傑偡丅
丂儕儗乕偺2斣偼婎斅偵挘傝弰傜偣偨GND慄偺摵慄偵僴儞僟晅偗偟傑偡丅
丂偙偺GND慄偺堦偐強偲arduino偺GND(塃僐僱僋僞乕偺塃偐傜2斣栚)傪攝慄偟偰偍偒傑偡丅
丂儕儗乕偺1斣偲僐僱僋僞乕偺NC丄儕儗乕偺10斣偲僐僱僋僞乕偺NO偼攝慄偱側偔偰僴儞僟偱偮側偘傑偟偨丅
丂側偍COM偲愙懕偡傞儕儗乕偺僺儞偼5斣偲6斣偳偪傜偱傕峔傢側偄偺偱偦傟偧傟攝慄偟傗偡偄曽偱峔偄傑偣傫丅
丂傑偨儕儗乕偺僺儞偺2斣偲9斣偼媡偱傕峔傢側偄偺偱arduino偺僐僱僋僞乕偺僺儞偵嬤偄曽傪愙懕偟傑偡丅
丂摨條偵愭弎偺奺僐僱僋僞乕偲arduino偺僺儞偺娭學傪尦偵儕儗乕偲僐僱僋僞乕傪9慻慡晹幚憰偟傑偡丅
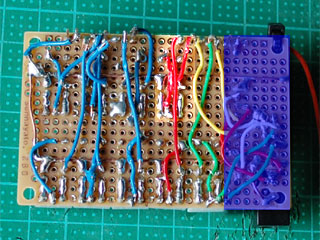
丂N僎乕僕偲偺愙懕恾偱偡丅
丂N僎乕僕偲偺愙懕偺徻嵶偼偙偪傜傪偛棗偔偩偝偄丅
丂側偍億僀儞僩梡偺僶儕僗僞(夁揹埑媧廂慺巕)偼arduino斉偱偼梫傜側偄側偄傛偆偱偡丅
丂傕偟億僀儞僩愗懼帪偵岆摦嶌偡傞傛偆偱偟偨傜僶儕僗僞傪晅偗偰傒偰偔偩偝偄丅
丂側偍崱夞偼RBIO-2U偲屳姺惈偺偁傞儃乕僪傪嶌惢偟偨偨傔僐僱僋僞乕宱桼偱偟偨偑捈愙N僎乕僕偺僐僱僋僞乕傪婎斅偵攝慄偟偰傕峔偄傑偣傫丅
丂偦偺応崌偼攝慄嵽傪尭傜偣傞偺偱傕偭偲嵽椏旓傪梷偊傞帠偑偱偒傑偡丅
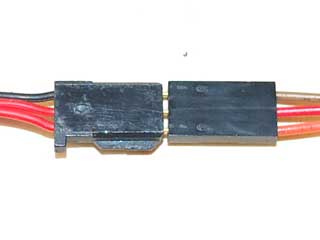
丂崱夞揹摦億僀儞僩偲偺愙懕偼億僀儞僩偺墑挿僐乕僪偱偼側偔僿僢僟乕僺儞偱帺嶌偟傑偟偨丅

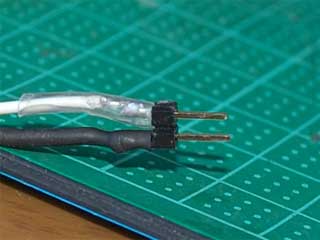
丂僿僢僟乕僺儞傪2杮暘僇僢僞乕偱愗傝庢傝奼挘僀儞僞僼僃僀僗偺働乕僽儖傪僴儞僟晅偗偟傑偡丅
丂墑挿僐乕僪偩偲+-偑媡偵偼愙懕偱偒側偄傛偆偵側偭偰偄傑偡偑偳偪傜偺曽岦偱傕愙懕偱偒傞偺偱擬廂弅僠儏乕僽傪暘偗偰億僀儞僩懁偺+-偺働乕僽儖傪娫堘傢側偄傛偆偵偟偰偄傑偡丅
丂SL揝摴柾宆偺儗僀傾僂僩偺応崌丄億僀儞僩3偼捈恑懁偱揮幵戜曽岦偵暘婒偡傞峔憿偵側偭偰偄傑偡丅
丂NATOC偱偼憖嶌忋丄揮幵戜偵岦偐偆曽岦傪暘婒懁偲偟傑偡丅
丂巗斕偺揹帴幃億僀儞僩傪巊梡偡傞応崌偼丄億僀儞僩3偺CN7偲CN8傪媡偵愙懕偟偰偔偩偝偄丅
丂側偍android斉NATOC偱偼億僀儞僩3偍傛傃揮幵戜偼僒億乕僩偝傟偰偄傑偣傫丅
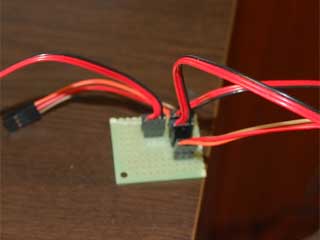
丒PWM梡偺儌乕僞乕僪儔僀僶乕
丂婎斅偺梋偭偰偄傞晹暘偵PWM梡偺儌乕僞乕僪儔僀僶乕傪幚憰偟傑偡丅

丂塃懁偵幨偭偰偄傞偺偑儌乕僞乕僪儔僀僶乕偺TA7291P偱偡丅
丂嵍壓偺崟偄偺偑揹尮梡偺AC傾僟僾僞乕偺僐僱僋僞乕偱偦偺忋偑弌椡傪梡偺僐僱僋僞乕偱忋偑庡揹尮梡偱壓偑揮幵戜揹尮梡偱偡丅
丂揮幵戜揹尮偼庡揹尮偺弌椡傪CN9偺儕儗乕偱惂屼偡傞傛偆偵攝慄偟偰偄傑偡丅
丂TA7291P偺幚憰偱偡偑1斣PIN傪GND慄偺椬偵側傞傛偆攝抲偟偰偄傑偡丅
丂偙偺応崌9斣PIN偑壓偺抜偺GND慄偵怗傟傞偐傕抦傟傑偣傫偑9斣偼僆乕僾儞側偺偱怗傟偰傕峔偄傑偣傫丅
丂傑偨7斣PIN偼TA7291P帺恎偺揹尮偱慜夞偼arduino偺5V抂巕偲愙懕偟偰偄傑偟偨偑崱夞偼偙偺抂巕偼僐僱僋僞乕偲愙懕偟偰偄側偄偺偱揹尮梡偺AC傾僟僾僞乕偺亄抂巕偲愙懕偟傑偟偨丅
丂TA7291P偺揹尮揹埑斖埻偼4.5V乣20V側偺偱偙偺斖埻側傜AC傾僟僾僞乕偐傜揹尮傪庢偭偰傕峔傢側偄偲巚偄傑偡丅
丂堦墳嶲峫偺偨傔偵婎斅棤懁偺幨恀偱偡偑幚憰晹昳偵崌傢偣偰攝慄偟偰偔偩偝偄丅
丂側偍庡揹尮偵儌乕僞乕僪儔僀僶乕弌椡傪偡傞応崌偼CN1偲CN2偼晄梫偲側傝傑偡丅
丂儌乕僞乕僪儔僀僶乕偺傒偱峴偆応崌偼偙傟傜偺幚憰偼峴傢側偔偰傕峔偄傑偣傫丅
丂側偍android斉NATOC偱偼幵椉偺懍搙惂屼偼僒億乕僩偝傟偰偄傑偣傫丅
丒僒乕儃儌乕僞乕偲偺愙懕
丂揮幵戜偼儕儗乕惂屼偑偱偒側偄偺偱僒乕儃儌乕僞乕偱偺惂屼偲側傝傑偡丅
丂偦偺偨傔僒乕儃儌乕僞乕傪杮奼挘儃乕僪偵愙懕偟傑偡丅
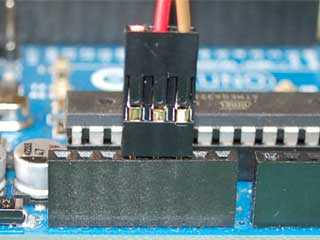
丂arduino偲偺愙懕僐僱僋僞乕偺2斣偲儕乕僪慄傪攝慄偟傑偡丅
丂QI働乕僽儖3S-3P偺曅曽偺怣崋慄(烌怓)傪僇僢僩偟偨傕偺傪arduino偺5V偲GND偵嵎偟崬傒傑偡丅
丂僇僢僩偟偨怣崋慄偲愭傎偳嶌惢偟偨婎斅偺儕乕僪慄偲傪寢慄偟傑偡丅(1P偺僐僱僋僞乕傪巊梡偟偰偄傑偡)
丂QI働乕僽儖偺曅曽傪偦偺傑傑僒乕儃偺僜働僢僩偵嵎偟崬傒傑偡丅
丂僒乕儃偑暋悢偺応崌偼偦傟偧傟偺慄傪暘婒偝偣傑偡丅
丂偪側傒偵婎斅偲僿僢僟乕僺儞偱偙偺條偺側傕偺傪嶌偭偰巊梡偟偰偄傑偡丅
丂側偍android斉NATOC偱偼揮幵戜偼僒億乕僩偝傟偰偄傑偣傫丅
丒僙儞僒乕偺愝抲
丂Arduino偺傾僫儘僌擖椡抂巕傪巊偭偰僙儞僒乕傪愙懕偟傑偡丅
丂TOMIX偺TCS儚儞僞僢僠僙儞僒乕(宆斣5558)偲偄偆偺傪巊偭偨椺傪徯夘偟傑偡丅
丂偙傟偼TOMIX偺帺摦摜愗傗帺摦塣揮僔僗僥儉偺僙儞僒乕偲巊梡偝傟傞傕偺偱儗乕儖偺DC僼傿乕僟偺嵎偟崬傒岥偵庢晅偗傜傟傑偡丅
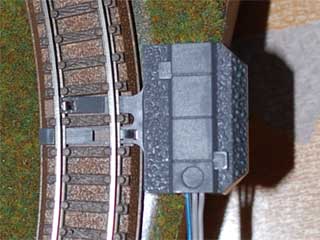
丂幵椉偺幵椫偑忋偺嬥懏晹暘偵忔偭偐傞偲儗乕儖偲捠揹偟偰幵椉偺捠夁傪専抦偱偒傞巇慻傒偵側偭偰偄傑偡丅
丂僾儔僗僠僢僋偺戜嵗偛偲儗乕儖偺撪懁偺愙抧晹暘偵忔偣傞傛偆偵愝抲偟傑偡丅
丂僙儞僒乕偺弌椡抂巕偺恀傫拞傪偺GND偵愙懕偟傑偡丅
丂僙儞僒乕偺弌椡抂巕偺椉抂傪arduino偺A0(傾僫儘僌擖椡)偵愙懕偟傑偡丅
丂偙偺擖椡抂巕偵10k兌偺僾儖傾僢僾掞峈傪愙懕偟傑偡丅
丂僾儖傾僢僾掞峈偺愭偼arduino偺5V抂巕偵愙懕偟傑偡丅
丂2杮偺僙儞僒乕偺弌椡抂巕偼幵椉偺恑峴曽岦暿偱偡偑崱夞偼恑峴曽岦偺専抦偼梫傜側偄偺偱偳偪傜偺恑峴曽岦偱傕専弌偱偒傞傛偆偵椉曽偺弌椡傪偮側偄偱偍偒傑偡丅
丂僙儞僒乕偼慡晹偱6儢強傑偱愝抲偡傞帠偑偱偒傑偡丅
丂摨條偺夞楬傪A1乣A5偵愙懕偟傑偡丅
丂側偍僾儖傾僢僾掞峈偼僙儞僒乕偺悢暘偑昁梫偲側傝傑偡丅
丒Arduino偺僗働僢僠
丂俶俙俿俷俠偱偼Arduino偺僗働僢僠(僾儘僌儔儉)傪採嫙偟偰偄傑偡丅
丂師偺曽朄偱Arduino偵揮憲偟偰偔偩偝偄丅
丂偙傟傜偺嶌嬈偼Windows PC傪巊偭偰峴偄傑偡丅
丂僾儘僌儔儉偺揮憲偵愭偩偭偰arduino娭楢偺僜僼僩僂僃傾偺僀儞僗僩乕儖嶌嬈偑昁梫偱偡丅
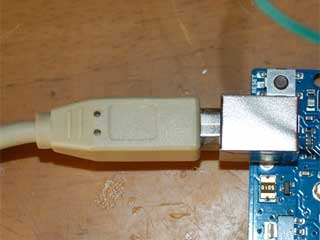
丂傑偨Arduino偲Windows PC傪愙懕偡傞偨傔偵USB働乕僽儖偑昁梫偱偡丅
丂崱夞巊偆USB働乕僽儖偼Type-B偲偄偭偰僾儕儞僞側偳偱椙偔巊傢傟傞愭偑惓曽宍偺傛偆側宍傪偟偨働乕僽儖偱偡丅
丂Windows PC偺僜僼僩僂僃傾偺僀儞僗僩乕儖偼偙偪傜偺僒僀僩偵暘偐傝傗偡偔彂偐傟偰偄傑偡丅
丂Arduino偺Windows PC僾儘僌儔儉偺僼傽僀儖儊僯儏偺奐偔僐儅儞僪傪幚峴偟傑偡丅
丂Arduino偺僗働僢僠僼傽僀儖偼NATOC傪僀儞僗僩乕儖偟偨僼僅儖僟乕偺壓偺sample\arduino\natoc偲僼僅儖僟乕偵偁傝傑偡丅
丂natoc.ino偲偄偆僼傽僀儖傪奐偄偰偔偩偝偄丅丅
丂師偵夋柺偺揮憲傾僀僐儞(忋偺夋柺偺敀偔側偭偰偄傞塃栴報)傪僋儕僢僋偟偰僾儘僌儔儉傪揮憲偟偰偔偩偝偄丅
丂揮憲偵愭棫偭偰USB働乕僽儖偑愙懕偝傟偰偄傞帠傪妋擣偟偰偔偩偝偄丅
丂堦搙揮憲偟偨僾儘僌儔儉偼arduino偐傜USB働乕僽儖傪敳偄偰傕徚偊傑偣傫丅
丂師偵arduino偵揹尮傪擖傟偨帪偵帺摦揑偵僾儘僌儔儉偼摦偒弌偟傑偡丅
丂NATOC傪幚峴帪偵偼NATOC偲捠怣偡傞偨傔偵USB働乕僽儖偱PC偵愙懕偟偰偍偔昁梫偑偁傝傑偡丅
丂android抂枛偐傜惂屼偡傞応崌偼USB働乕僽儖傪敳偄偰0斣僺儞(RX)偲Bluetooth僀儞僞僼僃僀僗偺7斣僺儞(TX)偲愙懕偟偰偍偔昁梫偑偁傝傑偡丅
丂側偍Bluetooth僀儞僞乕僼僃僀僗偐傜偼庴怣偺傒偲側傞偺偱憲怣(RX)傊偺愙懕偼昁梫偁傝傑偣傫丅
栚師偵栠傞