arduino偱懍搙惂屼
2013擭1寧16擔
丂NATOC傪巊偭偰N僎乕僕傪僐儞僺儏乕僞偱懍搙惂屼偡傞曽朄偲偟偰媅帡PWM傪巊偆曽朄偲僒乕儃儌乕僞傪巊偆曽朄傪採嫙偟偰偒傑偟偨丅
丂arduino偵偼捈愙PWM傪弌椡偡傞婡擻偑偁傝傑偡丅
丂偙偺婡擻傪巊偭偰N僎乕僕傪憱傜偣偰傒傑偡丅
丂傑偢扨弮偵3斣PIN偲GND傪儗僀傾僂僩偵嫙媼偟傑偡丅
丂arduino-UNO偵偼PWM弌椡壜擻側PIN偑尷傜傟偰偄偰3,5,6,9,10,11偑壜擻偱偡丅
丂懍搙傪曄偊傞曽朄偲偟偰擖椡偵儃儕儏乕儉傪偮側偄偱偦偺掞峈抣傪撉傒庢偭偰偦傟偵墳偠偰弌椡傪曄偊傞帠偑峫偊傜傟傑偡丅
丂偟偐偟偦傟偩偲捠忢偺僐儞僩儘乕儔乕偱憖嶌偡傞偺偲曄傢傜側偄偺偱崱夞偼僔儕傾儖捠怣傪巊偭偰PC偐傜懍搙惂屼傪偟傑偡丅
丂偙偪傜偺arduino偺僗働僢僠偱帋偟偰偄傑偡丅
丂arduino偺僜僼僩偵偮偄偰偼偙偪傜偺婰帠傗arduino偺僒僀僩傪嶲徠偟偰偔偩偝偄丅
丂僔儕傾儖捠怣偱PCSnnn偲憲怣偟偰傗傞偲偦偺nnn(懍搙僷乕僙儞僩)偵墳偠偨PWM傪PIN3偵弌椡偟傑偡丅
丂嵟弶偺PCS偼擟堄偵掕媊偟偨僐儅儞僪偱S偼僗僺乕僪惂屼傪昞偟傑偡丅
丂NATOC偱巊偭偰偄傞僀儞僞僼僃僀僗偺僐儅儞僪(PCXXXX)偵崌傢偣偰掕媊偟偰偄傑偡丅
丂師婜僶乕僕儑儞偱偼S偼僙儞僒乕擖椡偵偟偨偺偱僗僺乕僪惂屼偼P(PWM)偵曄峏偟傑偟偨丅
丂arduino偵僗働僢僠傪揮憲偟偰僣乕儖偺僔儕傾儖儌僯僞傪棫偪忋偘傑偡丅
丂僉乕儃僪偐傜PCS100偲懪偪崬傫偱憲怣儃僞儞傑偨偼Enter僉乕傪擖椡偡傞偲楍幵偼憱傝弌偡偼偢偱偡丅
丂弌椡偝傟傞揹尮偑嵟戝5V側偺偱廳偄幵椉偩偲憱傜側偄壜擻惈偑偁傝傑偡丅
丂PCS0傪憲怣偡傞偲幵椉偼掆巭偟傑偡丅
丂0埲忋偱傕悢帤偑彮側偄偲幵椉偼摦偒傑偣傫丅
丂偟偐偟偙傟偩偲嵟戝5V側偺偱憱傜偣傞幵椉偑尷傜傟傑偡丅
丂傑偨嵟戝偱傕懍搙偼偁傑傝弌傑偣傫偟曅曽岦偵偟偐憱傜偣傞帠偑偱偒傑偣傫丅
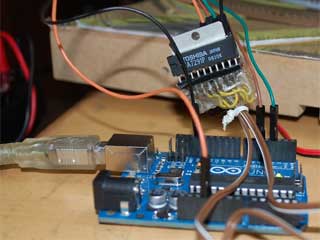
丂偦偙偱NATOC偱巊偭偰偄傞儌乕僞僪儔僀僶傪巊偄傑偡丅
丂TA7291P偲偄偆儌乕僞僪儔僀僶傪巊偄傑偟偨丅
丂偙偺儌乕僞僪儔僀僶偼扨偵弌椡偺揹埑傪憹暆偝偣傞偩偗偱側偔媡曽岦偵揹棳傪棳偣傑偡丅
丂偙偺婡擻傪巊偭偰幵椉偺夞傞曽岦傕惂屼偟傑偡丅
丂媡曽岦偵憱傜偣傞帪偺arduino偺弌椡偼4斣PIN偼PWM弌椡偑偱偒側偄偺偱5斣PIN偵偟傑偟偨丅
丂偙偺5斣PIN傪TA7291P偺6斣PIN偵惓曽岦偺PWM弌椡偺3斣PIN偼TA7291P偺5斣PIN偵愙懕偟傑偡丅
丂TA7291P偺弌椡偼2斣PIN偲10斣PIN側偺偱偙傟傪儗僀傾僂僩偵愙懕偟傑偡丅
丂揹尮偼亄傪TA7291P偺4斣丄8斣PIN偵亅懁傪弌椡偼TA7291P偺1斣偵愙懕偟傑偡丅
丂傑偨arduino偺GND傕TA7291P偺1斣偵愙懕偼偟傑偡丅
丂TA7291P偺揹尮偺7斣PIN傪arduino偺5V揹尮PIN偵愙懕偟傑偡丅
丂TA7291P偺揹尮偼4.5V乣20V側偺偱偙偺斖埻偱偁傟偽幵椉揹尮偐傜愙懕偟偰傕峔偄傑偣傫丅
丂側偍TA7291P偺4斣偼惂屼揹尮抂巕(ref)偱偙偙偵偺PWM怣崋傪擖椡偡傞曽朄傕偁傞傛偆偱偡偑偙偙傪5V埲壓偵偡傞偲幵椉揹尮偵12V埵偐偗偰傕幵椉偼憗偔憱偭偰偔傟傑偣傫偱偟偨丅
丂幵椉揹尮偲偟偰N僎乕僕偺僷儚乕僷僢僋偑彂偄偰偁傝傑偡偑丄+-傪媡揮偝偣偨傝揹埑傪棊偲偣偨傝偱偒傞偺儌乕僞僪儔僀僶偑惓忢偵摦偐側偔側傞帠傕峫偊傜傟傑偡丅
丂傑偨僷儚乕僷僢僋帺恎偑PWM弌椡偟偰偄傞応崌傕偁傝傑偡偺偱拲堄偟偰偔偩偝偄丅
丂崱夞偼埨掕壔揹尮傪12V偵愝掕偟偰幚尡偟偰偄傑偡偑9V乣12V偺AC傾僟僾僞乕偑巊偊傞偲巚偄傑偡丅
丂埲慜NATOC偺PWM惂屼偺帋尡偱攝慄偟偨儌乕僞僪儔僀僶偑偦偺傑傑巊偊傑偟偨丅
丂儌乕僞僪儔僀僶偺幚尡偼偙偪傜偺arduino偺僗働僢僠偱帋偟偰偄傑偡丅
丂愭掱偺僗働僢僠傪奼挘偟偰悢帤偺慜偵-傪晅偗傞偲媡曽岦偵憱峴偟傑偡丅
丂傑偨儌乕僞僪儔僀僽偺僾儗乕僉乕婡擻傪僒億乕僩偟偰偄偰悢帤偑0偺応崌僽儗乕僉傪偐偗傞傛偆偵偟偰偄傑偡丅
丂儌乕僞僪儔僀僽偺椉曽偺擖椡偑HIGH偺応崌偼傕儌乕僞偵僽儗乕僉偑偐偐傝傑偡丅
丂幵椉傪巭傔傞帪丄PCS0(僽儗乕僉偁傝)偲PCS1(僽儗乕僉側偟)偱僽儗乕僉偺岠壥偑妋偐傔傜傟傞偲巚偄傑偡丅
丂幚嵺偵摦偐偟偨帪偺摦夋偱偡丅
丂丂丂丂丂
丂憖嶌偼NATOC偱峴偭偰偄傑偡丅NATOC偺師偺僶乕僕儑儞偱偼arduino傪僒億乕僩偡傞梊掕偱偡丅
丂崱夞偺幚尡偱arduino偺PWM弌椡婡擻偼廫暘巊偊傞帠偑暘偐傝傑偟偨丅
丂崱夞峴偭偨嶌嬈偼攝慄傪娫堘偊傞偲arduino丄儌乕僞僩僪儔僀僶偍傛傃N僎乕僕幵椉偺攋懝傪敽偄傑偡偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
栚師偵栠傞