SL鉄道模型転車台電動化実験その3
2013年1月5日
前回の実験では転車台の向きによって転車台のレールに流れる電源の極性を反転する装置を付けました。
しかしこれによってサーボに負荷がかかってしまい回転方向によっては停止位置が少しずれてしまう事が分かりました。

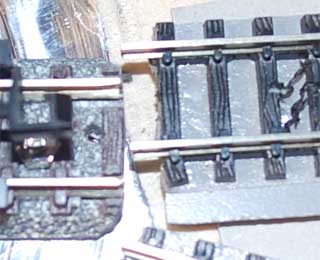
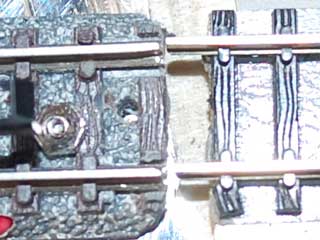
左の写真は時計回りに回った時の停止位置で右の写真は反時計回りに回った時の停止位置です。(3.6度位ずれています)
サーボの移動する角度が現在の角度より小さい場合はサーボは反時計回りに回ります。
大きい場合は時計回りに回ります。
サーボの特性として停止時に軸が微振動するハンチングと呼ばれる現象があります。
これを防ぐためにこのサーボには停止位置に近づくにつれてトルクを減少させる機能があります。
ロボゼロ用サーボ(RS30Xシリーズ)の場合、停止位置8度手前からトルクを減少させていって最大トルクの13%まで減少させていきます。
この機能のため負荷がかかった状態ではトルク不足となり停止位置手前で止まってしまいます。
上の写真では時計回りで停止位置を調整しているため時計回りはずれていないように見えますが両方向もずれているものと思われます。
トルクを何度から減少させていくかはコンプライアンススロープという設定値で決まります。
またトルクを最大の何パーセントまで減少させるかはパンチという設定値で決まります。
コンプライアンススロープを0にしたりパンチを100%にすればこの機能を抑制できるのですが、先に述べたハンチングが起こってしまいます。
これらの値をいろいろ変更してやってみた結果、コンプライアンススロープを2度、パンチを25%にするとハンチングの発生を極力抑えてそれほど大きくずれない事が分かりました。
コンプライアンススロープとパンチを上の値で設定した場合、反時計回りの場合、1度位ずれてしまいます。
この程度のずれであれば停止位置を調整する事によって脱線させないようにできると思いますが、回転する方向によって補正をかける事にしました。
反時計回りの場合は-1.0度(サーボ位置指定のパラメータで-10)の補正をかけます。
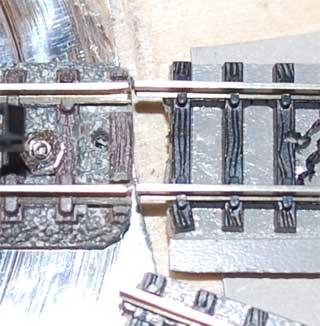
補正をかけた時の反時計回りの停止位置です。
arduinoのスケッチはこちらになります。
今回のスケッチから転車台を動かしていない場合はサーボのトルクをOFFにして電力を抑えるようにしました。
おそらく配布される転車台はクリック機構が付くと思われそれほどシビアに考える必要はないかも知れません。
しかしクリック機構が固くてサーボでは転車台を回せない事も想定されます。
その場合はクリック機構を外してサーボの精度で転車台を線路に合わせる必要があります。
目次に戻る