SL鉄道模型転車台電動化実験その1
2012年12月29日
講談社の週刊SL鉄道模型の目玉は転車台だと思いますが残念ながら手動になっています。
NATOCでコントロールするにはこれも電動化する必要があります。
コンピュータ制御しない場合でもコントローラで車両を操作するのと同様、リモートで転車台も操作したいところです。
転車台関係のパーツの配布は来年の予定です。
当初はパーツが揃って形状を見てから電動化の方法を考えようと思っていました。
しかし既にロボゼロのサーボを使って電動化する事は決めているのでこの方式で可能かどうか実験をやってみました。
ロボゼロのサーボは既にNATOCでサポートしており既に今回シリーズでもポイントの電動化に使っています。
ただ今までと違うのは転車台という事で正確な位置で止める必要があります。
転車台の線路がレイアウトの線路に正確に接続でき脱線しないで車両が通過できる事を確認しておきます。
Nケージの場合1mm程度ずれても脱線するのでミリ以下の精度が必要です。
今回のレイアウトの転車台の線路の長さは100mmなのでこの軌道の円周は314mmという事になります。
一応ロボゼロのサーボはコマンド方式で0.1度の精度で角度を指定できる仕様になっています。
314mm÷3600=0.087mmで0.1mm以下の精度で角度を指定できます。(あくまで仕様の話なのでサーボ自身がその精度を出せるという訳ではありません)
実際の転車台の改造方法は今回のものとは異なると思われますので詳しい改造方法は実際にレイアウトに設置する時に記述します。
SL鉄道模型のレイアウトは転車台への引き込み線は5本あります。
そのうち1本の引き込み線はカーブのものがあります。
カーブと直線の接続は車両の軌道が変化するため脱線する危険がありますので今回の実験でも片方の引き込み線はカーブにしてみました。

転車台のレールは今回のレイアウトに合わせて100mmにカットしました。
真ん中にサーボホーンを取り付けてサーボに差し込みます。
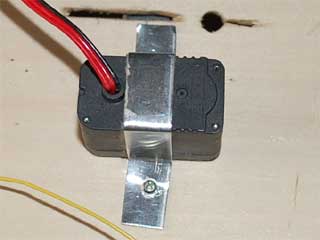
最初はサーボホーンを使わずサーボ軸にレールをビス留めにしたのですが、角度がずれてきて正しい位置に停止しなくなるのでしっかりとサーボホーンをビス留めにしました。
転車台のレールへはSL鉄道模型のコントローラーの転車台用出力端子から電源を供給します。
この端子からは本線の電源と同じものが出力されています
コントローラーの転車台スイッチでON/OFFできOFFにすると転車台で車両が止まりONにすると動き出します。
今回はサーボの制御に前回と同様arduinoを使ってやってみました。
Windowsやandroidを使って同様の事はできるはずですがコンピュータ制御でなく通常のメカニカルスイッチでの操作性を確認してみます。
androidの接続は前回のコマンド方式の時とほぼ同じです。
今回のスイッチはトグルスイッチではなくプッシュスイッチを使います。
スイッチはふたつで片方は転車台を直線線路と接続する時、もう片方はカーブ線路と接続する時に押します。
arduinoのスケッチはこちらになります。
arduinoのソフトウェアについては前回の記事を参照してください。
転車台の停止位置は微調整が必要になってきます。
例では直線路の停止位置が100、カーブ線路の停止位置が-260となっています。
この値を実際に車両を走らせながら脱線しないように調整していきます。
スケッチを修正してarduinoへの転送を繰り返します。
なお指定できる範囲は-1500〜1500なので停止位置がこの範囲外になった場合はサーボホーンの取り付け位置を変えてください。
また転車台の回転速度はプログラムの最初の部分で定義しています。
例では1000になっていますがこれは転車台が一周する速度を秒数×100で設定します。
早くしたい場合は少なく遅くする場合は多くします。
あまり早くすると正確な位置で止まらず脱線する可能性があります。
本シリーズの転車台の動きは不明ですが一応通常のレイアウト同様反転する機能を付けてみます。
反転用のスイッチをひとつ追加します。
反転用スイッチはON/OFFのトグルスイッチでONにすると反転位置(通常の停止位置に対して180°回転)に停止します。
このスイッチの切替だけでは転車台は動きださずに位置指定スイッチが押された時はじめて転車台は動き出します。
現在の位置で反転させたい場合は反転スイッチを切り替えてから現在停止している位置指定スイッチを押します。
反転スイッチのスケッチはこちらになります。
転車台を反転させると車両の進む方向も反転するのでコントローラーの転車台用出力電源は使う事はできません。
別のコントローラーを使って電源を供給する必要があります。
実際に転車台の操作を行った動画です。
転車台の速度を10秒/、5秒/周、2秒/周でやってみましたが2秒だと必ず脱線してしまいます。
5秒だと脱線する事はないのですが安全値を見て一周10秒位の速度が適当かと思います。
転車台とレイアウトの線路を合わせるのにはかなりの精度が必要ですが今回のサーボ方式でも制御できる事が分かりました。
おそらく今回の転車台はポイント同様、カチッカチッというクリック機構がありメカ的にちゃんと接続できるものと思われます。
その場合今回のような精度を必要としないかも知れません。しかしこの機構により回すのに硬くなってしまう可能性もあります。
今回の実験でクリック機構を外しても転車台が正確に止まる事が確認できました。
目次に戻る