僾儗僗僥俁偱揝摴柾宆
2011擭11寧20擔
2011擭12寧1擔夵掶
丂慜夞偼儘儃僛儘偺僒乕儃偱揝摴柾宆傪捈愙僐儞僺儏乕僞惂屼偟偰傒傑偟偨偑丄崱夞傕偆堦屄僒乕儃傪巊偭偰僗僺乕僪傪惂屼偟偰傒傑偟偨丅
丂慜夞僒乕儃惂屼偺僾儘僌儔儉傪彂偄偰偄偰婥偑晅偄偨偺偱偡偑僐儅儞僪偺僷儔儊乕僞偵僒乕儃ID側傞傕偺偑偁傝傑偡丅
丂偙傟傪曄偊偨傜暋悢偺僒乕儃傪惂屼偱偒傞偺偱偼側偄偐偲峫偊傑偟偨丅

丂傑偢偼幚尡偱偡丅
丂僒乕儃偲僔儕傾儖曄姺儃乕僪傪僗僩儗乕僩偺僕儍儞僷乕慄偱偮側偄偱偄傑偟偨偑偙傟傪暘婒偝偣僒乕儃偑2屄偮側偘傞僕儍儞僷乕慄傪嶌惉偟傑偟偨丅
丂幚尡偱偼儘儃僛儘偺婙忋偘僎乕儉偱巊偭偨RS30xPacketUtil偲偄偆僜僼僩傪巊傢偣偰傕傜偄傑偟偨丅
丂偙偺僜僼僩丄RS306MD偺僐儅儞僪傪擖椡偡傞偲僷働僢僩偺僨乕僞傪昞帵偟偰偔傟傑偡丅
丂偙傟偱偄偪偄偪儅僯儏傾儖傪挷傋側偔偰傕憲怣偡傞僷働僢僩僨乕僞偑暘偐傝傑偡丅
丂杮摉偵彆偐傝傑偟偨丅
丂傑偢僒乕儃ID偑曄峏偱偒傞偐偺幚尡偱偡丅
丂僕儍儞僷乕慄偵偼曄峏偡傞僒乕儃傪1屄偩偗愙懕偟偰偍偒傑偡丅
丂Packet Maker偺僐儅儞僪偵乽僒乕儃ID傪曄峏乿偲偄偆偺偑偁傝傑偡丅
丂岺応弌壸帪偵偼僒乕儃ID偑1偵側偭偰偄傑偡偑偙傟傪崱夞捛壛偟偨僒乕儃偺僒乕儃ID傪2偵曄峏偟傑偡丅
丂Data偵曄峏偡傞僒乕儃ID偺2傪擖椡偟偰偵僒乕儃偵Packet Controller偱憲怣偟傑偡丅
丂偙傟偱偙偺僒乕儃偺僒乕儃ID偼2偵曄傢偭偨偼偢偱偡丅
丂帋偟偵Packet Controller偺ServoID傪2偵偟偰Torque ON傪墴偟偰偦偺壓偺僗儔僀僟乕傪摦偐偟偰惓忢摦嶌傪妋擣偟傑偡丅
丂偟偐偟偙偺傑傑偱偼僒乕儃傗曄姺儃乕僪偺愙懕傪奜偟偨傜尦偺1偵栠傞偺偱僒乕儃偺ROM僨乕僞傪彂偒姺偊傞昁梫偑偁傝傑偡丅
丂Packet Maker偺僐儅儞僪偵乽ROM彂偒崬傒乿偲偄偆偺偑偁傝傑偡丅
丂偙偙偱拲堄偟側偗傟偽偄偗側偄偺偼Packet Maker偺ID偵怴偟偄僒乕儃ID偺2傪僙僢僩偟側偗傟偽偄偗側偄帠偱偡丅
丂Packet Controller偱憲怣偟偰ROM偺僨乕僞傪彂偒姺偊傑偡丅
丂堦搙USB愙懕傪奜偟偰偐傜傕偆堦搙偙偺僜僼僩傪棫偪忋偘捈偟偰偪傖傫偲僒乕儃ID偑2偵彂偒姺傢偭偰偄傞帠傪妋偐傔傑偡丅
丂師偵2偮偺僒乕儃傪惂屼偱偒傞偐幚尡偱偡丅
丂暘婒偟偨傕偆堦曽偺僕儍儞僷乕慄偵僒乕儃ID傪彂偒姺偊偰偄側偄僒乕儃傪愙懕偟傑偡丅
丂Packet Controller偺ServoID傪1偲2偵愗傝懼偊偰偦傟偧傟偺僒乕儃偑惓忢偵摦嶌偡傞偐傪妋擣偟傑偡丅
丂偙傟偱僔儕傾儖曄姺儃乕僪偲巊梡偡傞COM億乕僩偑偦傟偧傟傂偲偮偱嵪傓帠偑暘偐傝傑偟偨丅
丂崱夞摦偐偡偺偼慜夞偵堷偒懕偒揝摴柾宆彮擭帪戙偱偡丅
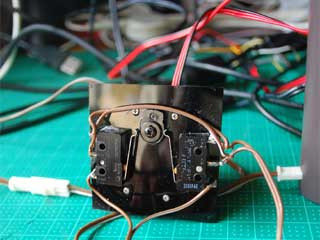
丂24崋偵晅懏偟偰偒偨僐儞僩儘乕儔乕傪夵憿偟傑偡丅
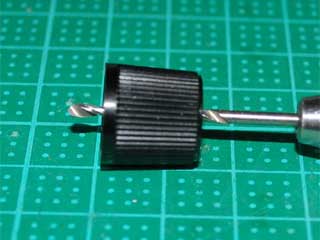
丂偙偺僐儞僩儘乕儔乕偵儗僩儘挷偺儗僶乕偑晅偄偰偄傑偡偑偦傟傪奜偟偰偦偙偵儃儕儏乕儉偺僣儅儈傪庢傝晅偗傑偡丅
丂儃儕儏乕儉偺僣儅儈偼偄傠偄傠側傕偺偑攧傜傟偰偄傑偡偑師偺億僀儞僩偱慖傃傑偟偨丅
丂丒僔儍僼僩岴宎偑6.1mm冇
丂丒僒乕儃幉偵僱僕巭傔偟傗偡偄峔憿
丂丒壛岺偑偟傗偡偄嵽幙(僼僃僲乕儖傑偨偼價僯儖)
丂丒僔儍僼僩屌掕偑僱僕巭傔
丂丒奜宍悺朄偑偁傑傝戝偒偔側偄
丂崱夞峸擖偟偨偺偼僒僩乕僷乕僣偺K80756R1偲偄偆惢昳偱偡丅
丂忋婰偺忦審偵崌偆僣儅儈偼懠偵傕偨偔偝傫偁傞偲巚偄傑偡丅
丂僐儞僩儘乕儔乕偺夵憿傪峴偄傑偡丅
丂傑偢僒乕儃儌乕僞偲僐儞僩儘乕儔傪屌掕偡傞偨傔偺僼儗乕儉斅傪庢傝晅偗傑偡丅
丂崱夞偼庤帩偪偺1mm岤偺僄儞價斅傪巊梡偟傑偟偨丅嵽幙偼壗偱傕峔偄傑偣傫偑壛岺偟傗偡偄暔偑椙偄偱偟傚偆丅
丂偪側傒偙偺僄儞價斅偼愜傝嬋偘傞偲妱傟傞偨傔擬偟偰捈妏偵嬋偘傑偟偨丅
丂忋偺恾偺傛偆偵僼儗乕儉斅傪壛岺偟傑偡丅
丂2mm偺寠傪塃偐傜8mm埵偺強偵奐偗傞偺偱偡偑僐儞僩儘乕儔偵庢傝晅偗傞帪偵尰暔崌傢偣偱奐偗偰傕峔偄傑偣傫丅
丂僼儗乕儉斅偼嵍偐傜15mm偺強偱捈妏偵愜傝嬋偘傑偡丅

丂愜傝嬋偘偨抁偄曽傪僒乕儃偵摉偰偰價僗寠傪奐偗傑偡丅
丂僒乕儃偺2杮偺僱僕偼奜偟偰偍偒傑偡丅
丂偙偺帪僒乕儃幉偑僼儗乕儉斅偺拞墰偵側傞傛偆偵偟傑偡丅
丂傑偨僼儗乕儉斅偵摉偨傜側偄僊儕僊儕偺埵抲偵偟傑偡丅
丂椉柺僥乕僾偱屌掕偟偰偍偔偲僘儗側偔偰傗傝堈偄偲巚偄傑偡丅

丂僒乕儃偺棤偐傜僺儞僶僀僗偱僼儗乕儉斅偵價僗寠傪偺埵抲偵報傪晅偗傑偡丅
丂僪儕儖偺宎偑偁傑傝懢偄偲僒乕儃偺僱僕嶳傪偮傇偡壜擻惈偑偁傞偺偱側傞傋偔嵶偄(1mm埲壓)僪儕儖傪巊偭偰偔偩偝偄丅
丂2偮偺價僗寠偺埵抲偵報傪晅偗偨偲偙傠偱僼儗乕儉斅偐傜僒乕儃傪奜偟2mm偺僪儕儖偱價僗寠傪奐偗傑偡丅
丂僒乕儃偵晅懏偟偰偄偨2杮偺價僗偱僒乕儃傪僼儗乕儉斅偵庢傝晅偗傑偡丅
丂僼儗乕儉斅偲僒乕儃偺價僗寠偑崌傢側偄応崌偼僼儗乕儉斅偺價僗寠傪峀偘偨傝奐偗捈偟偰偔偩偝偄丅
丂僒乕儃偲僣儅儈偼僱僕棷傔偵偟傑偡偑偦偺傑傑偱偼嬻夞傝偡傞偺偱娫偵掞峈偺戝偒偄傕偺傪嫴傒傑偡丅

丂崱夞僑儉斅傪儚僢僔儍乕忬偵偟偨傕偺傪嶌傝傑偟偨偑椉柺僥乕僾傪嫴傒崬傫偱傕峔傢側偄偲巚偄傑偡丅
丂僣儅儈偵2mm偺寠傪奐偗傑偡丅
丂偙偺帪廳梫側偺偼側傞傋偔拞怱奐偗傞帠偱偡丅
丂拞怱偐傜僘儗偰偟傑偆偲僒乕儃偺夞揮偵巟忈傪偒偨偟傑偡丅
丂僐儞僷僗摍偱惓妋偵拞怱埵抲傪妱傝弌偟偰偔偩偝偄丅
丂崱夞偼挌搙僣儅儈偲摨偠戝偒偝偺帟幵偑偁偭偨偺偱偦傟傪摉偰偰寠傪奐偗傑偟偨丅
丂妸傝巭傔傪嫴傒崬傫偱僒儃幉偵僣儅儈傪僱僕巭傔偟傑偡丅
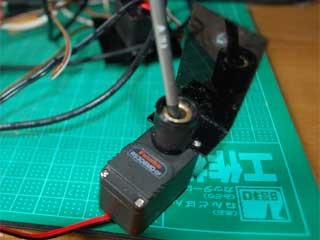
丂偙偺帪僒乕儃偼僯儏乕僩儔儖偺埵抲(僒乕儃幉偺栚報偑忋)偵偟偰偍偄偰偔偩偝偄丅
丂傑偨僣儅儈偺屌掕僱僕偼儗儞僠偑巊偄傗偡偄傛偆偵栚報偲斀懳懁偺埵抲偵棃傞傛偆偵偟偰偔偩偝偄丅

丂榋妏儗儞僠偱僣儅儈傪僐儞僩儘乕儔偺儃儕儏乕儉幉偵屌掕偟傑偡丅
丂偙偺帪儃儕儏乕儉偺埵抲偼挌搙恀傫拞偺妏搙偵偟偰偍偒傑偡丅

丂僼儗乕儉斅傪2mm埵偺栘僱僕偱僱僕棷傔偟傑偡丅僼儗乕儉斅偵偼偙偺帪偵尰暔崌傢偣偱寠傪奐偗偰傕峔偄傑偣傫丅
丂僐儞僩儘乕儔懁偵偼1.5mm掱搙偺壓寠傪奐偗偰偍偗偽嶌嬈偑偟傗偡偔側傝傑偡丅
丂側偍僐儞僩儘乕儔偺價僗寠偼拑怓偺働乕僗偺忋抂偲揹抮奧偺忋抂偺拞娫埵抲偵偟傑偡丅

丂偙傟偱僐儞僩儘乕儔偺嶌嬈偼廔椆偱偡丅
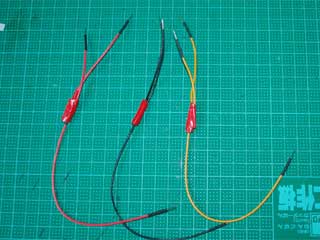
丂慜夞嶌偭偨慜恑屻恑愗傝懼偊僒乕儃偺儕乕僪慄傪僐儞僩儘乕儔偲儗僀傾僂僩偺娫偵愙懕偟傑偡丅
丂慜夞偼壒惡偱惂屼偟傑偟偨偑崱夞偼壗偱惂屼偝偣傛偆偐偲峫偊傑偟偨丅
丂側傞傋偔懍搙偺僐儞僩儘乕儖傪儗僀傾僂僩偵揱偊傗偡偄傕偺傪巊偭偰傒傑偟偨丅
丂傆偲栚偵晅偄偨偺偑僾儗僀僗僥乕僔儑儞偺僐儞僩儘乕儔乕偱偡丅
丂幚偼戝暘慜僾儗僀僗僥乕僔儑儞偺僐儞僩儘乕儔乕傪僀儞僞乕僼僃僀僗偵巊偭偨僾儘僌儔儉傪嶌偭偨帠偑偁傝傑偡丅
丂摉帪偺僾儗僀僗僥乕僔儑儞偺僐儞僩儘乕儔乕偺PC愙懕偵偼偙偺傛偆側僀儞僞乕僼僃僀僗傪昁梫偲偟傑偟偨丅
丂偟偐偟嵟怴僾儗僀僗僥乕僔儑儞俁偼倀俽俛愙懕偱偡丅
丂偙傟偼傕偟偐偲偰偦偺傑傑愙懕偱偒傞偺偱偼偲巚偄傑偟偨偑丄巆擮側偑傜僪儔僀僶乕偑昁梫側傛偆偱偡丅
丂崱夞YouTube偵SIXAXIS Driver偲偄偆僼儕乕僜僼僩傪巊梡偟傑偟偨丅
丂偙偺僜僼僩偺巊偄曽偱偡偑愢柧摦夋傪宖嵹偝傟偰偄傞曽偑偄傜偭偟傖偭偨偺偱偙偪傜傪嶲徠偵偟偰偔偩偝偄丅
丂偪側傒偵巹偺応崌傕Windows7偱偟偨偑屳姺惈塢乆偺愝掕偼昁梫偁傝傑偣傫偱偟偨丅
丂崱夞偺僾儘僌儔儉偼慜夞偺傕偺傪僶乕僕儑儞傾僢僾偟傑偟偨丅
丂崱夞怴偨偵嶌偭偨偺偼僾儗僀僗僥乕僔儑儞俁僐儞僩儘乕儔偲偺愙懕晹暘偱偡丅
丂慜弎偺僪儔僀僶乕偱昗弨偺僕儑僀僗僥僢僋偲偟偰埖偊傑偡丅
丂僕儑僀僗僥僢僋偼DirectX偺SDK偱僾儘僌儔儉偐傜巊偆偙偲偑偱偒傑偡丅DirectX偺SDK偺Joystick偲偄偆僒儞僾儖僾儘僌儔儉偑傎偲傫偳偦偺傑傑巊偊傑偡丅
丂僒乕儃ID傪曄偊傞偺偼慜弎偺RS30xPacketUtil偱峴偊傑偡偑愜妏側偺偱杮僾儘僌儔儉偺僆僾僔儑儞婡擻偲偟偰嶌偭偰偍偒傑偟偨丅
丂僾儘僌儔儉偺杮懱偺僒乕儃ID偺曄峏儃僞儞傪墴偡偲塃偺僒乕儃ID愝掕僟僀傾儘僌偑昞帵偝傟傑偡丅
丂崱夞偺懍搙惂屼梡偺僒乕儃ID偼2傪巊梡偟傑偡偺偱昞帵偝傟偨夋柺偺傑傑OK儃僞儞傪墴偟偰偔偩偝偄丅
丂側偍偙偺帪愙懕偟偰偍偔僒乕儃偼懍搙惂屼梡偺僒乕儃偩偗偱偡偺偱拲堄偟偰偔偩偝偄丅
丂偙偺僒乕儃傪尦偺忬懺偵栠偡帪偼OK儃僞儞偺戙傢傝偵岺応弌壸帪偵栠偡儃僞儞傪墴偟偰偔偩偝偄丅
丂偙偺帪拲堄偟側偗傟偽偄偗側偄偺偼尰嵼偺ID傪2偵曄峏偟偰偍偐側偗傟偽偄偗側偄揰偱偡丅
丂婛偵2偵曄峏偝傟傞僒乕儃偵懳偟偰偼1偺傑傑偩偲僒乕儃ID偑堘偆偺偱柍帇偝傟偰偟傑偄傑偡丅
丂僾儗僀僗僥乕僔儑儞俁僐儞僩儘乕儔傪愙懕偟側偔偰傕杮懱偺夋柺偩偗偱傕憖嶌偱偒傑偡丅
丂崱夞懍搙惂屼梡偺僗儔僀僟乕傪捛壛偟傑偟偨偺偱偦偺僗儔僀僟乕偺儅僂僗憖嶌偱懍搙偑僐儞僩儘乕儖偱偒傑偡丅
丂僾儗僀僗僥乕僔儑儞俁僐儞僩儘乕儔傪愙懕偡傞偲僐儞僩儘乕儔偱憖嶌偡傞帠偑偱偒傑偡丅
丂塃偺僕儑僀僗僥僢僋傪慜屻偵摦偐偡偲慜恑偟偨傝屻恑偟傑偡丅僕儑僀僗僥僢僋偺妏搙偵傛傝僗僺乕僪偑僐儞僩儘乕儖偝傟傑偡丅
丂傑偨儃僞儞憖嶌偱慜恑屻恑偑僐儞僩儘乕儖偱偒傑偡丅
丂仜儃僞儞偑慜恑偱仩儃僞儞偑屻恑丄亊儃僞儞偑掆巭偱偡丅
丂仮儃僞儞憖嶌偼僕儑僀僗僥僢僋偺妏搙偵娭學側偔嵟戝懍偵側傝傑偡丅
丂僕儑僀僗僥僢僋偐傜庤傪棧偡嵟掅懍偵側偭偰偟傑偆偺偱塣峴偟懕偗偨偄帪偵巊偄傑偡丅
丂壒惡擣幆婡擻偼偦偺傑傑巆偟偰偁傝傑偡偺偱乽憗偔乿偲偐乽抶偔乿偲偄偆壒惡偱懍搙傕僐儞僩儘乕儖偱偒傑偡丅(楢懕偟偰柦椷偡傞偲偦傟偵墳偠偰憹尭偡傞)
丂傑偨乽廔椆乿偲偄偆柦椷偱僾儘僌儔儉傪廔椆偝偣傞傛偆偵偟傑偟偨丅
丂壒惡擣幆偵偮偄偰偼偙偪傜傪嶲徠偟偰偔偩偝偄丅
丂幚嵺偵僾儗僀僗僥乕僔儑儞俁偺僐儞僩儘乕儔傪巊偭偰俶僎乕僕(揝摴柾宆彮擭帪戙)傪摦偐偟偨摦夋偱偡丅
丂丂丂丂丂
丂尦乆僐儞僩儘乕儔偺儗乕僶乕偱懍搙傪僐儞僩儘乕儖偱偒丄偦傟傪僕儑僀僗僥僢僋偵抲偒姺偊偨偩偗側偺偱婡擻揑偵偼偁傑傝夋婜揑側傕偺偱偼偁傝傑偣傫偑丄堦戜偺USB曄姺儃乕僪偱暋悢偺僒乕儃偑惂屼偱偒傞帠偑暘偐偭偨偺偼戝偒側惉壥偩偲巚偄傑偡丅
丂崱夞嶌惉偟偨僾儘僌儔儉傪壓婰偺URL偵傾僢僾偟偰偍偒傑偡偺偱嫽枴偺偁傞曽偼僟僂儞儘乕僪偟偰巊偭偰傒偰偔偩偝偄丅
丂丂ncon.zip
丂擣幆岅渂傗僒乕儃偺妏搙偺僠儏乕僯儞僌曽朄摍偼揧晅偺ReadMe.txt偵彂偐傟偰偄傑偡丅
丂偨偩偟僒乕儃儌乕僞乕偺夵憿偑敽偆偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
丂NATOC 2.80偱僒乕儃偵傛傞惂屼傪僒億乕僩偟傑偟偨丅NATOC傪巊偆偲楍幵偺埵抲擣幆傗僾儘僌儔儉偱偺帺摦塣揮偑偱偒傑偡丅
丂NATOC 2.80偼偙偪傜偐傜僟僂儞儘乕僪偡傞偙偲偑偱偒傑偡丅
丂偮偄偱偵摨偠曽朄偱儘儃僛儘偺僒乕儃傪捈愙摦偐偟偰傒傑偟偨丅僾儘僌儔儉偼彮偟彂偒姺偊偰偄傑偡丅
丂丂丂丂丂
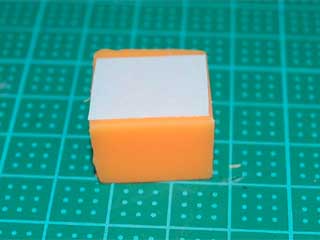
丂傕偆彮偟娙扨側夵憿曽朄傪徍榓偺揝摴柾宆偺僐儞僩儘乕儔乕傪夵憿偟傑偟偨丅
丂巗斕偺僾儔僢僠僢僋徚偟僑儉(岤偝14mm)傪僇僢僞乕摍偱20mm亊20mm偺戝偒偝偵僇僢僩偟傑偡丅
丂椉柺偵椉柺僥乕僾(嫮椡)傪揬偭偰偍偒傑偡丅

丂僐儞僩儘乕儔乕偺僴儞僪儖傪奜偟偰偍偒傑偡丅
丂儃儕儏乕儉偺埵抲偼掆巭偲嵟懍偺拞娫(揝摴柾宆偺応崌偼愗崬傒偑塃傪岦偔)偵夞偟偰偍偒傑偡丅
丂慜弎偺曽朄偱僣儅儈傪庢傝晅偗偨僒乕儃傪儃儕儏乕儉偺幉偵嵎偟崬傒傑偡丅
丂榋妏儗儞僠偱僣儅儈傪幉偵屌掕偟偰傑偡丅
丂偙偺帪僒乕儃偼僯儏乕僩儔儖偺埵抲偵偟偰偍偒傑偡丅


丂揝摴柾宆彮擭帪戙偺僐儞僩儘乕儔乕側偳偺僒乕儃偺埵抲偑崅偄応崌偼岤偝偑20mm偺徚偟僑儉傪巊梡偡傞偐徚偟僑儉偺曽岦傪曄偊偰愝抲偟傑偡丅
栚師偵栠傞