・Bluetoothインターフェイス
ロビをBluetoothでコントロールするためにはインターフェイスモジュールが必要です。
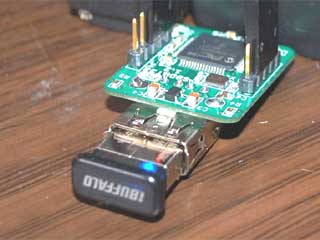
ランニングエレクトロニクスのSBDBT32というマイコン基板を使用します。
このマイコン基板はmicroSDカードスロットルが付いていて起動時にSDカードにファームウェアを書き込んでおくとそのファームウェアを読み込んで実行します。
一度読み込んだファームはフラッシュメモリに書き込まれるのでSDカードを抜いても大丈夫です。
このマイコン基板は5Vの電源で動くのでサーボモーターの電源と共通にできます。
またBluetoothアダプタとしてバッファローのBSBT4D09BKを使用しています。
このBluetoothアダプタの規格はBluetooth4.0ですがBluetooth3.0のアダプタも動作する事を確認しています。
Bluetoothインターフェイス接続に先立ってロビのサーボケーブルを接続するためにコネクター部を作製する必要があります。
ロボゼロの場合はサーボに直接ケーブルが配線されていて3PINの標準的なコネクターで接続できました。
ロビのサーボはACHという特殊なコネクターで接続されます。
このコネクターを使ったケーブルがロビで配布され、それを使ってテストボードやマイコンボードに接続します。
以下のコネクターがロビで使われているコネクターと同等品のものと思われます。
BM03B-ACHSS-GAN-TF LF SN
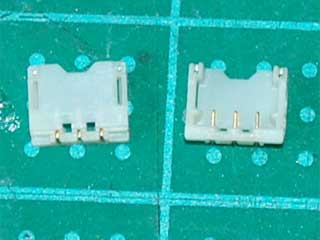
直接基板の表面にハンダ付けするタイプ(表面実装)のようで足が非常に短いです。
スルーホールの基板にハンダ付けするようにはいかず直接リード線を足にハンダ付けしようとすると熱でコハウジングを溶かしてしまい結構難しいです。
以下の方法で実装すると比較的簡単に作業が行えます。
ハーフピッチのユニバーサル基板を使用します。
AB基板 ハーフピッチ蛇の目基板
ハーフピッチだと通常の基板のピッチ(1/10インチ)の半分の1.27mmとなります。
コネクターのピッチは1.2mmですが足が3本なので多少の違いは許容範囲です。
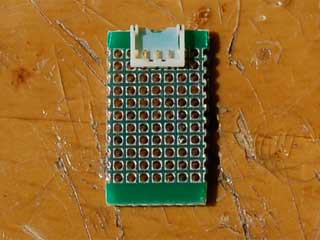
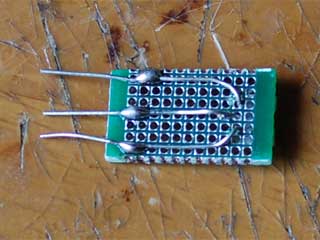
基板を適当な大きさに切ったものにコネクターを瞬間接着剤(ゼリー状)で接着します。
この時コネクターの足は基板の穴の位置になるようにしてください。
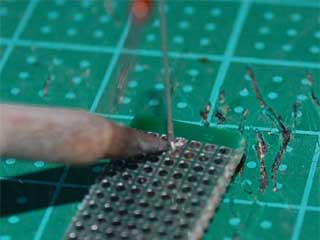
コネクターの足にリード線をハンダ付けしていきます。
リード線はなるべく細くて硬いものを使います。(写真はダイオードの足を使っています)
最初に真ん中の足をハンダ付けします。

まずリード線の先端にハンダを盛り付けます。
このハンダによってコネクターの足とハンダ付けをします。
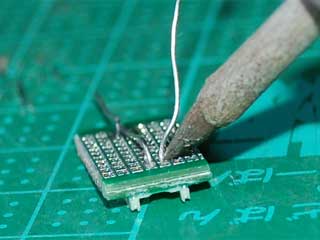
コネクターの真ん中の足の位置にハンダを盛ったリード線を差し込みます。
リード線の根元に半田ごてを当てて盛り付けたハンダを溶かします。
この時力を加えてリード線を押し込んだら半田ごてを離してハンダが固まるのを待ちます。
リード線を引っ張ってハンダがコネクターの足に付いた事を確認します。

この時点でハンダ付けが成功したを確認するためにテスターで通電試験を行います。
他の足を付けた時点で行うと修正するのが困難なため一本づつ行った方が楽です。
コネクターの真ん中のピンとリード線が通電してている事を確かめるのと他の2本のピンとは通電していない事を確認します。
通電していない場合はもう一度リード線に半田ごてを当ててリード線をもっと押し込みます。
盛り付けたハンダが足らないようでしたらハンダをもう少し多く盛り付けてやり直してください。
他のピンと通電する場合はリード線のハンダが隣のパターンに接触していない事を確認してください。
接触している場合はハンダを溶かしてパターンから取り除いてください。
同様にハンダを盛りつけたリード線を隣の穴に差し込んでハンダ付けします。
この時半田ごてはリード線の外側に当ててハンダを溶かします。
真ん中の時と同様、引っ張って付いている事を確認した後、テスターによる通電試験を行います。
残りの足も同様にハンダ付けを行います。

3本とも通電の確認ができたらリード線の途中を基板にハンダ付けしてリード線を固定しておきます。
リード線にケーブルをハンダ付けしたら完成です。
リード線は上から信号線、VCC、GNDです。
ロボゼロのサーボで使われていた標準的なコネクターを接続しています。
SBDBT32の2番ピン(VDD,左赤色のリード線)と3番ピン(GND,左茶色のリード線)には外部から5Vの電源を供給しています。
7番ピン(TX,右橙色のリード線、コネクタを1ピン空けて接続しているので注意)のシリアル送信出力はサーボの信号線(端の赤のリード線)とコネクタで接続します。
サーボの電源(黒のリード線と真ん中の赤のリード線)はSBDBT32と同じ電源から供給します。


Bluetoothインターフェイスはロビのスタンドの中に格納しました。
そのためスタンドの裏蓋が外せるようバッテリィケースを少し後ろにずらしてスタンドに貼り付けてあります。
・ファームウェアのインストール
SBDBT32のファームウェアは何も設定されていないのでサーボ用のファームウェアを読み込む必要があります。
ファームウェアはSDカードのルート(フォルダーなしで直接)にimage.hexというファイル名で書き込んでおきます。
このファイルがあるとSBDBT32に電源を入れるとフラッシュメモリにファームウェアとして読み込まれます。
このファイルはWRITTEN.HEXというファイルにリネームされます。(このファイル消しても構いません)
まずこちらを開いてください。
リンクをクリックすると上のダイアログが表示されますので「開く」を選択します。(使用するブラウザにより操作方法が異なります)
パソコンに接続したmicroSDカードを開きます。
パソコンのドラッグアンドドロップ操作でファームウェアのファイルをmicroSDカードにコピーします。
microSDカードは使用中のものでもよく他のファイルやフォルダーがあっても構いません。
ファイルを書き込んだmicroSDカードはSBDBT32のmicroSDカードスロットルに差し込んでおきます。
SBDBT32に電源を入れるとSBDBT32の赤と橙色のLEDが激しく点滅してSDカードを読み込みます。
正常に読み込まれるとしばらくして橙色のLEDだけが点灯します。
またBSBT4D09BKなどのBluetoothアダプタは青のLEDが点滅します。
このファームウェアのソースファイルにはMatthias Ringwald氏のbtstackが含まれています。
またこのファームウェアを商用でご利用される場合は、ランニングエレクトロニクスの製品でご利用ください。
セットアップ
目次に戻る