カメラによる車位置の検出
・カメラの設定
IRACSはMicroSoftのDirectShowでサポートされているビディオカメラを使って列車位置を検出します。
ビディオカメラのドライバーのインストールは各ビディオカメラに付属しているドライバーソフトとインストール手順書に従ってください。
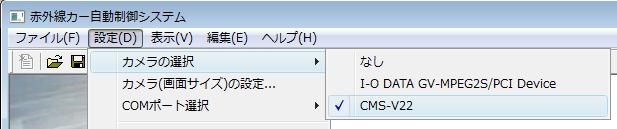
カメラが複数台接続されている場合は下記の操作で位置検出に用いるカメラを選択してください。
・カメラの設置
カメラはなるべく車の上方に赤外線コントローラと平行するように設置してください。
これはカメラの撮影範囲と赤外線コントローラの有効範囲をなるべく一致させるためで、違っているとカメラに映っていても赤外線が届かず車が制御できなくなってしまいます。
低い位置から撮影するとカメラに対して上下の移動に対して正しく位置検出ができなくなります。なるべく高い位置に設置してください。
カメラの設置場所とアングルはIRACSの画面を見ながら調整してください。


カメラとコンピュータの距離が長くなりカメラのUSBコードが長さが足らなかったりI/Oコントローラの分と合わせてコンピュータ(ノートPC等)のUSBコネクタの数が足らなかったりした場合はケーブルの長いUSBハブ(写真上)を使うのが便利です。
また長さが足らないだけならUSB延長コード(写真下)が使えます。

・検出結果の表示
検出された車位置は、重心位置をあらわす十字カーソル、または車の方向を表す三角形で表示する事ができます。
重心位置を表示する時は 方向を表示する時は
方向を表示する時は ツールバーのアイコンをクリックしてください。
ツールバーのアイコンをクリックしてください。
・映像ファイルによる位置検出
カメラの画像の代わりに映像ファイル(AVIファイル)を使って車位置の検出をする事ができます。
車位置が検出できても映像の車の制御は行えないのでこの機能は実用的ではありませんが、車位置の検出機能の評価用にお使いください。
ファイルメニュの映像ファイルを読み込むコマンドで映像ファイル(AVIファイル)を読み込んでください。
読み込んだ映像の車の検出位置と方向がカーソルで表示されます。
映像ファイルの車位置検出ではコントロールボタンが連動しないため方向表示が正しく表示されません。
目次に戻る